
O uso do VL53L0X com Arduino tem se tornado cada vez mais comum em projetos que exigem medições de distância mais precisas e confiáveis. Se você já utilizou um sensor ultrassônico HC-SR04, provavelmente percebeu que ele funciona bem na maioria das situações, mas também possui algumas limitações, como imprecisão em objetos pequenos, cone de detecção muito amplo e dificuldades com superfícies anguladas.
É justamente nesse cenário que o sensor de distância a laser VL53L0X se destaca. Utilizando tecnologia Time of Flight (ToF), ele oferece medições mais precisas em um módulo compacto e fácil de integrar.
Neste artigo, você vai entender o que é o sensor VL53L0X, como ele funciona e como utilizar o VL53L0X com Arduino de forma simples e prática. Vamos aprender?
O que é o sensor VL53L0X?
O VL53L0X é um sensor de distância a laser do tipo Time of Flight (ToF), do Inglês “Tempo de vôo”, fabricado pela STMicroelectronics. Em termos simples, ele mede a distância entre o sensor e um objeto emitindo pulsos de luz laser infravermelha e calculando quanto tempo essa luz leva para ir e voltar. A faixa de medição padrão é de até 2 metros, com uma precisão que fica em torno de ±3%, o que é bem superior ao que o HC-SR04 entrega. E tudo isso num pacote minúsculo: o chip em si tem apenas 4,4 x 2,4 mm.
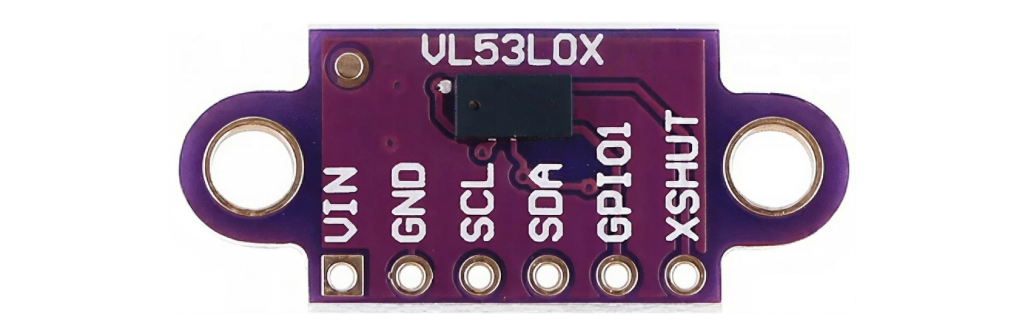
Entre as características que fazem ele se destacar estão a alta precisão de ±3% típico, o tamanho muito compacto, o baixo consumo de energia (tipicamente ~20 mA em operação), a comunicação I2C: fácil de usar com qualquer Arduino. Também a capacidade de operar de forma independente da cor ou refletividade da superfície. Você pode encontrar o módulo já montado numa plaquinha com os pinos prontos para protoboard. Uma boa opção é o Sensor de distância a laser VL53L0X de alta precisão disponível na MakerHero.
Como funciona o VL53L0X?
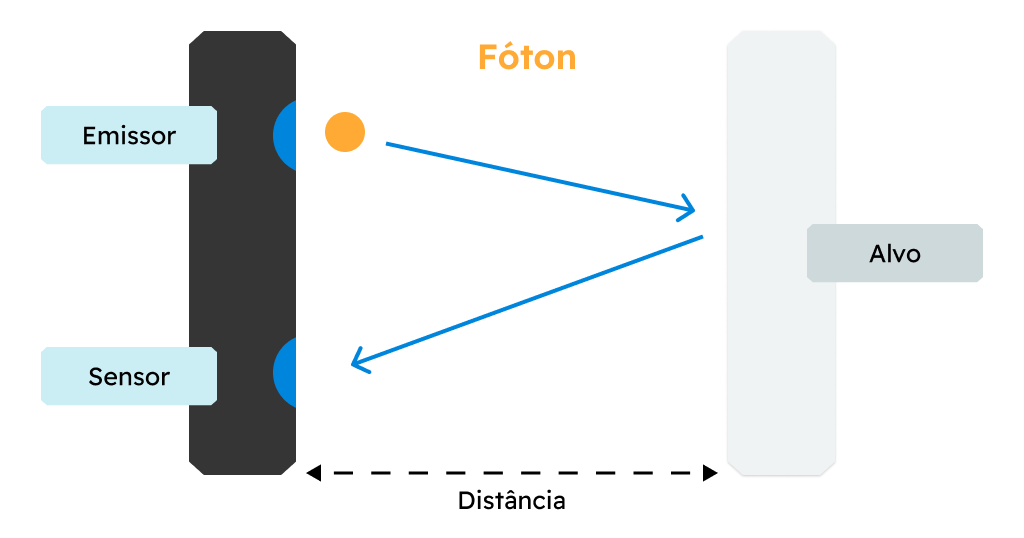
O princípio de funcionamento é bem interessante, para dizer o mínimo. O sensor emite um pulso de laser infravermelho (940 nm, invisível ao olho humano) e mede com extrema precisão quanto tempo esse pulso leva para bater em algum objeto e voltar. Como a velocidade da luz é constante e conhecida, basta dividir o tempo pelo dobro (ida e volta) para calcular a distância. Isso é o Time of Flight : literalmente, “tempo de vôo” do feixe de luz.
E por que isso é melhor que o ultrassônico? O sensor ultrassônico usa ondas de som. Som é bem mais lento que a luz, o que significa que o tempo de resposta é maior. Além disso, o som se espalha em cone, detectando tudo que estiver na frente : o VL53L0X tem um feixe de luz muito mais focado.
Comparando com sensores IR (infravermelhos) analógicos tradicionais, a vantagem é ainda maior: o IR analógico mede a quantidade de luz refletida, o que varia bastante dependendo da cor e do material da superfície. Um papel preto absorve luz, um espelho reflete demais : o resultado é imprecisão. O VL53L0X usa tempo, não intensidade, então a cor da superfície importa bem menos.
Vantagens do VL53L0X em projetos com Arduino
Para quem faz projetos maker, as vantagens práticas são bem concretas. A alta precisão garante medições na casa do milímetro, consistentes e repetíveis : se você precisa detectar se uma gaveta está aberta 5 cm ou 10 cm, o HC-SR04 vai travar e o VL53L0X resolve.
A independência de cor e superfície também conta muito: ele funciona com superfícies escuras, claras, rugosas ou lisas sem grandes diferenças de resultado. Não é à prova de tudo, pois espelhos e materiais muito transparentes ainda confundem, mas é muito mais robusto que o IR analógico.
O tamanho compacto faz com que o módulo completo caiba facilmente em qualquer projeto pequeno, seja um robô miniatura, um produto final ou uma caixinha impressa em 3D. E a comunicação I2C usa apenas dois pinos de dados (SDA e SCL), que praticamente todo Arduino tem. Isso inclusive permite colocar vários sensores no mesmo barramento, alterando os endereços via pino XSHUT (caso o sensor deixe disponível).
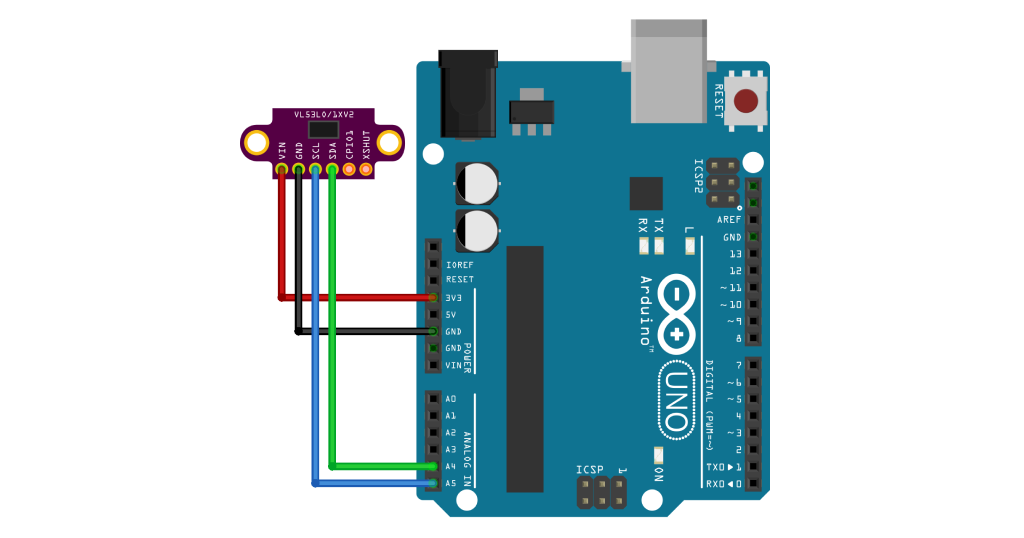
Como conectar o VL53L0X ao Arduino
A ligação é bem simples. O módulo tem os pinos VIN (ou VCC), GND, SDA, SCL e, opcionalmente, XSHUT e GPIO1. No Arduino Uno ou Nano, VIN vai para 3,3V ou 5V (dependendo do módulo), GND no GND, SDA no A4 e SCL no A5. Os pinos XSHUT e GPIO1 são opcionais, usados respectivamente para controle de liga/desliga e para interrupções.
Vale um aviso importante: o chip VL53L0X opera em 3,3V. A maioria dos módulos de breakout já tem um regulador de tensão e conversores de nível lógico, aceitando 5V direto do Arduino. Mas verifique a descrição do seu módulo antes de ligar. O esquemático básico é só isso, sem resistores externos, sem capacitores. O módulo já vem com tudo que precisa.
Código do VL53L0X com Arduino
A biblioteca mais simples e confiável é a Adafruit VL53L0X. Para instalar, abra o Gerenciador de Bibliotecas na IDE (software) do Arduino (menu Sketch > Incluir Biblioteca > Gerenciar Bibliotecas), pesquise por “VL53L0X”; e instale a da Adafruit. Ela também vai pedir para instalar a Adafruit BusIO, que é uma dependência. Instale ambas sem medo.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 |
#include <Wire.h> #include "Adafruit_VL53L0X.h" #define led 13 // pino 13 do Arduino UNO Adafruit_VL53L0X sensor = Adafruit_VL53L0X(); VL53L0X_RangingMeasurementData_t medicao; long tempoLoop = 0; int LEDstatus = 0; void setup() { pinMode(led, OUTPUT); Serial.begin(115200); // Inicializa o sensor via I2C // O endereço padrão é 0x29 if (!sensor.begin()) { Serial.println("Erro ao inicializar o VL53L0X!"); Serial.println("Verifique as conexões SDA/SCL e a alimentação."); while (1); // trava aqui se não inicializar } Serial.println("VL53L0X inicializado com sucesso!"); } void loop() { if (millis() - tempoLoop > 200) { // faz uma leitura a cada 0,2 segundos tempoLoop += 200; // Faz a leitura de distância: // O resultado fica em medicao.RangeMilliMeter e // o status da mesma medição fica em medicao.RangeStatus sensor.rangingTest(&medicao, false); if (medicao.RangeStatus != 4) { // Status 4 = fora de alcance ou erro de leitura Serial.print("Distância: "); Serial.print(medicao.RangeMilliMeter); Serial.println(" mm"); } else { Serial.println("Fora de alcance!"); } // pisca um led, just for fun if (LEDstatus == 1) { digitalWrite(led, LEDstatus); LEDstatus = 0; } else { digitalWrite(led, LEDstatus); LEDstatus = 1; } } } |
O sensor.begin() tenta comunicar com o VL53L0X via I2C. Se falhar por cabo solto, endereço errado, sensor sem energia, ele retorna false e o código trava com uma mensagem de erro no Serial. Isso é um bom hábito: sempre verificar se o sensor respondeu antes de sair usando. O método rangingTest() faz uma medição completa e preenche a estrutura VL53L0X_RangingMeasurementData_t.
O valor que nos interessa é o RangeMilliMeter, que dá a distância em milímetros. O campo RangeStatus informa se a leitura foi válida : o valor 4 indica erro (objeto muito longe, sem reflexo suficiente), e sempre deve ser verificado antes de usar o valor, caso contrário você pode estar lendo lixo. O resultado sai no monitor serial a 115200 baud (velocidade); Lembre de configurar a mesma taxa no monitor serial da IDE.
Exemplo prático de uso
O código acima já é suficiente para muita coisa útil. Com um display OLED ou LCD acoplado, você tem um medidor de distância de bolso. Útil em oficinas, impressão 3D, marcenaria.
Em robôs com Arduino, o VL53L0X substitui bem o HC-SR04 para detecção de obstáculos: como o feixe é mais estreito, você tem mais controle sobre o que está detectando, e dá até para fazer um scan rotacionando o sensor com um servomotor. Para automação residencial, o sensor serve para detectar se uma porta está aberta ou fechada, medir o nível de líquido num reservatório ou acionar uma lâmpada quando alguém se aproxima. Discreto e fácil de esconder.
Dicas e cuidados ao usar o VL53L0X
Alguns pontos merecem atenção. O limite de 2 metros é o máximo em condições ideais (superfície clara, boa refletividade): na prática, com superfícies escuras ou muita luz ambiente, esse alcance cai bastante. Eu te diria para usá-lo até uns 50-60 centímetros sem medo. Para distâncias maiores, considere um sensor LIDAR dedicado. Espelhos e materiais transparentes como vidro e acrílico podem confundir o sensor, porque o laser passa por eles ou reflete de forma imprevisível.
Superfícies muito absorventes como veludo preto, também reduzem o alcance. Luz solar direta tem muita componente IR e pode saturar o receptor, causando leituras erráticas: em aplicações outdoor, cubra o sensor ou use em locais sombreados. E como já mencionado, o chip opera em 3,3V, se o seu módulo não tem regulador integrado, não alimente com 5V. Por fim, para usar mais de um VL53L0X no mesmo barramento I2C, é preciso usar o pino XSHUT (se estiver disponível) para desligar um sensor por vez e alterar o endereço I2C de cada um via software. A biblioteca da Adafruit suporta isso.
VL53L0X vs sensor ultrassônico
Para ajudar a decidir qual usar: o VL53L0X oferece precisão de ±3% (na casa dos milímetros), alcance de até 2 metros, feixe estreito de ~25°, baixa interferência de cor, velocidade de leitura de ~30 ms e comunicação I2C. O HC-SR04 tem precisão típica de ±1 cm, alcance de até 4 metros, cone de detecção largo de ~30°, nenhuma interferência de cor ou luz, leitura em ~60 ms e comunicação por pinos digitais (trigger/echo) : sendo também mais barato.
O VL53L0X é a escolha certa quando a precisão importa, os objetos são pequenos, o espaço é reduzido ou você quer I2C para economizar pinos. O HC-SR04 faz mais sentido quando o orçamento é apertado, o alcance precisa ser maior que 2 metros, a imprecisão não é um problema ou o projeto é de aprendizado básico.
Conclusão
O VL53L0X é um daqueles componentes que você coloca na bancada e fica impressionado com o quanto ele é capaz, prometendo tão pouco. Pequeno, preciso, fácil de usar, com três linhas de código você já tem uma leitura de distância confiável em milímetros. A biblioteca da Adafruit torna a curva de aprendizado praticamente zero para quem já tem experiência com Arduino, e o protocolo I2C garante que você não vai desperdiçar pinos no seu microcontrolador.
Se você está fazendo um projeto que precisa de medição de distância com qualidade, o VL53L0X é um investimento que vale a pena. Recomendo pegar o módulo na MakerHero e colocar para funcionar hoje mesmo. Qualquer dúvida, deixe nos comentários! E para acompanhar todas as novidades da MakerHero, acompanhe nosso Instagram!