Neste post, vamos explorar como funciona o controle de motores DC utilizando PWM (Pulse Width Modulation) com o Arduino e o módulo Ponte H L298N. Explicaremos o que é uma Ponte H e como ela permite o controle de direção e velocidade dos motores.

Além disso, vamos entender como o PWM é usado para ajustar a velocidade de rotação de um motor DC de forma eficiente. Você também encontrará exemplo de código, esquema de ligação e explicações detalhadas, proporcionando o conhecimento necessário para controlar a velocidade e o sentido de um motor em seus projetos com Arduino.
O que é uma Ponte H?
A Ponte H é um circuito eletrônico amplamente utilizado para controlar o sentido de rotação de motores DC. O nome “Ponte H” deriva da configuração do circuito, que se assemelha à letra “H”, onde quatro interruptores (transistores ou MOSFETs) são organizados para direcionar a corrente de forma controlada ao motor.

Esse circuito permite que a corrente flua em duas direções distintas através do motor, possibilitando o controle da rotação tanto no sentido horário quanto no anti-horário. Isso é essencial em aplicações como robótica, onde é necessário inverter a direção de um motor para mover robôs, braços mecânicos e outros dispositivos em diferentes direções.

As principais aplicações da Ponte H estão relacionadas ao controle de motores DC e motores de passo. Com a Ponte H, é possível controlar tanto o sentido de rotação do motor quanto sua velocidade, especialmente quando combinada com uma técnica de modulação como o PWM (Pulse Width Modulation), que veremos mais adiante.
O que é PWM (Pulse Width Modulation)?
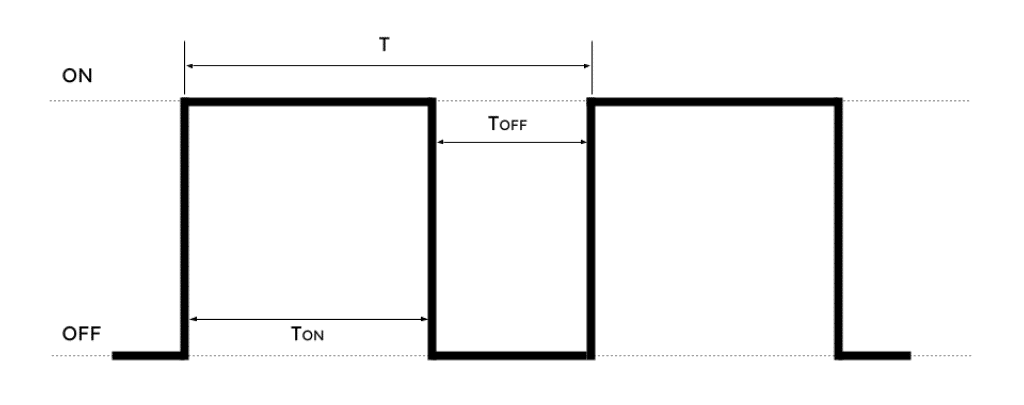
O PWM (Pulse Width Modulation), ou Modulação por Largura de Pulso, é uma técnica utilizada para controlar a potência fornecida a dispositivos eletrônicos, especialmente em motores e LEDs. Ela funciona ao alternar rapidamente um sinal entre os estados ligado (ON) e desligado (OFF), variando a quantidade de tempo em que o sinal permanece em cada estado dentro de um ciclo fixo, chamado de período (T). Para mais detalhes confira nosso post completo sobre O que é PWM.
A principal vantagem do PWM é permitir o controle eficiente da potência sem a necessidade de dissipar muita energia na forma de calor, como ocorre em métodos de controle linear. Ao variar o tempo que o sinal permanece em ON, é possível controlar a tensão média aplicada a um dispositivo e, consequentemente, regular seu comportamento (como a velocidade de um motor DC ou o brilho de um LED).
O funcionamento do PWM se baseia no conceito de ciclo de trabalho (Duty Cycle), que é a proporção de tempo em que o sinal está em ON dentro de um período completo.

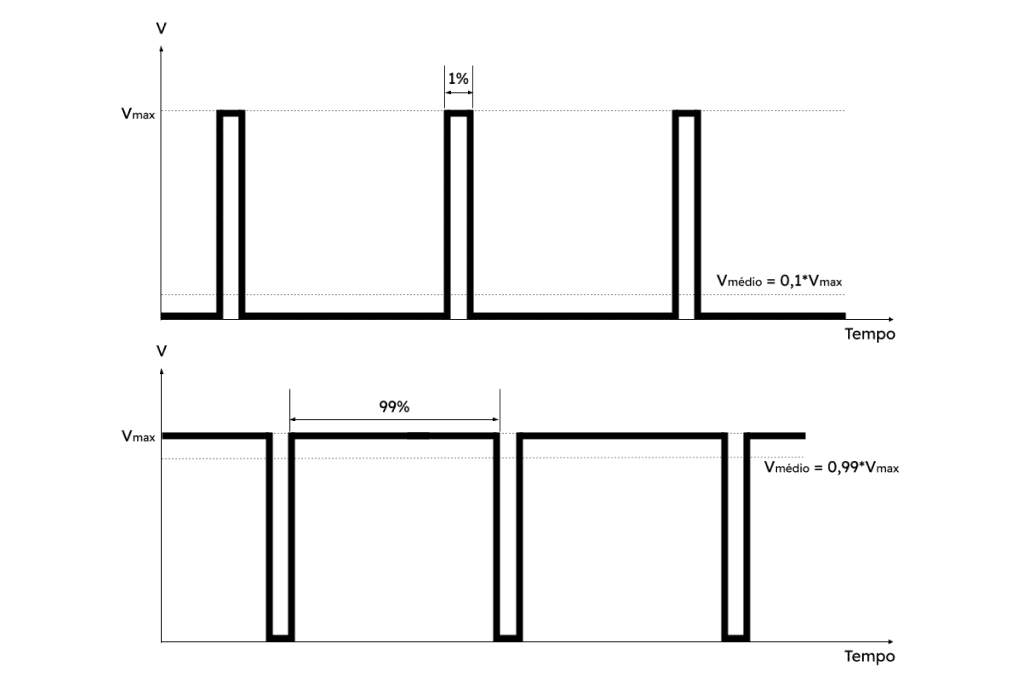
O ciclo de trabalho é geralmente expresso em porcentagem e determina a potência entregue ao dispositivo controlado. Quanto maior o tempo em que o sinal permanece em ON, maior será a tensão média entregue e, por consequência, maior será a potência aplicada ao dispositivo.
Por exemplo:
- Duty Cycle de 0%: O sinal fica o tempo todo em OFF, não há energia aplicada ao dispositivo (motor parado ou LED apagado).
- Duty Cycle de 50%: O sinal fica metade do tempo em ON e metade do tempo em OFF, aplicando 50% da tensão total ao dispositivo (motor gira a metade da sua velocidade máxima ou LED brilha com metade da intensidade).
- Duty Cycle de 100%: O sinal fica o tempo todo em ON, aplicando a tensão máxima ao dispositivo (motor na rotação máxima ou LED com brilho total).
Essa modulação permite que dispositivos como motores DC, que respondem à variação de tensão, sejam controlados de maneira eficiente, ajustando a tensão média sem a necessidade de variar diretamente a alimentação.
Como funciona o módulo Ponte H L298N?
A Ponte H L298N é um driver de motor amplamente utilizado para controlar motores DC e motores de passo em projetos de eletrônica e robótica. Ele é construído com o circuito integrado L298N (datasheet), que é capaz de controlar dois motores DC simultaneamente, ou um motor de passo, permitindo o controle tanto do sentido de rotação quanto da velocidade dos motores.
A Ponte H L298N possui vários pinos e terminais que permitem o controle dos motores e a conexão com o Arduino. Aqui está uma breve descrição dos principais pinos:

- Motor A e Motor B: São os terminais para conectar os dois motores DC ou o motor de passo.
- ENA e ENB: Esses pinos são usados para controlar a velocidade dos motores A e B através de sinais PWM. Se esses pinos estiverem com o jumper conectado, o controle de velocidade não funcionará, pois eles estarão alimentados com 5V constantemente.
- 5VEN e 5V: O driver L298N possui um regulador de tensão integrado. Quando o módulo opera entre 6V e 35V, o pino 5V fornece uma saída regulada que pode alimentar outros componentes eletrônicos.
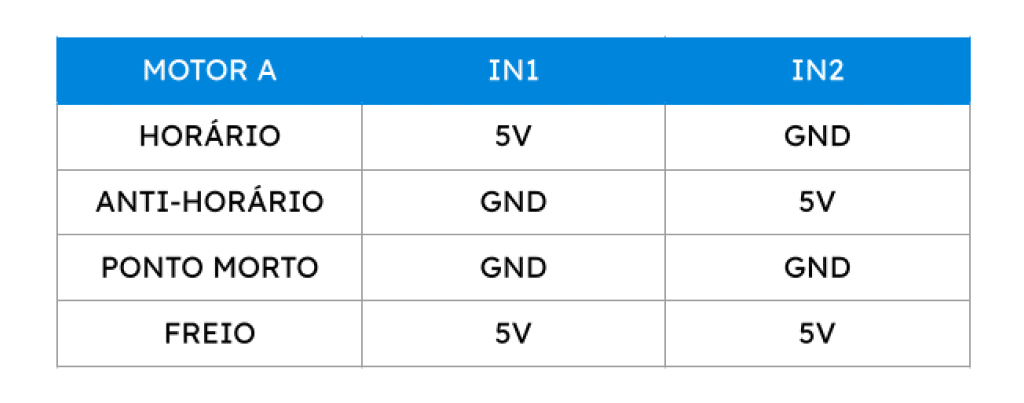
- IN1, IN2, IN3 e IN4: Esses pinos são as entradas digitais que controlam o sentido de rotação dos motores. IN1 e IN2 controlam o Motor A, enquanto IN3 e IN4 controlam o Motor B. Dependendo da combinação de níveis lógicos aplicados a esses pinos, o motor gira no sentido horário ou anti-horário.
- 6-35V e GND: Esses terminais são conectados à fonte de alimentação externa que será usada para os motores. Por exemplo, se estiver utilizando motores de 12V, você conectará uma fonte de 12V nesses pinos.
A tabela abaixo mostra a ordem de ativação do Motor A através dos pinos IN1 e IN2. O mesmo esquema pode ser aplicado aos pinos IN3 e IN4, que controlam o Motor B:
Como controlar a velocidade do motor DC com PWM?
Controlar a velocidade de um motor DC com PWM (Pulse Width Modulation) é uma técnica prática e eficiente. O PWM permite variar a tensão média aplicada ao motor, o que, por sua vez, controla sua velocidade de rotação. Veja o passo a passo para entender como isso funciona e como implementar em um projeto.
- Duty Cycle de 0%: O motor permanece parado (tensão média de 0V).
- Duty Cycle de 50%: O motor gira a metade da sua velocidade máxima, pois recebe metade da tensão de alimentação.
- Duty Cycle de 100%: O motor gira em sua velocidade máxima, já que recebe a tensão máxima durante todo o ciclo.
O Arduino oferece uma maneira simples de controlar a velocidade de um motor DC usando PWM. Para isso, usa-se a função analogWrite(), que gera um sinal PWM em pinos específicos do Arduino:
analogWrite(PINO, VALOR_ANALOGICO)
Onde:
- PINO: número do pino do Arduino o qual se deseja que o sinal PWM seja gerado.
- VALOR_ANALOGICO: valor (de 0 a 255), proporcional ao Duty Cycle a ser gerado. Ou seja, para Duty Cycle de 100%, deve-se utilizar valor 255, já para Duty Cycle 20% deve-se utilizar o valor 51 e assim por diante.
Para controlar a velocidade do motor DC com PWM, você irá precisar dos seguintes materiais:

- Arduino Uno R4 Minima
- Driver Motor Ponte H L298N
- Motor DC 3-6V ou Motor DC 12V
- Cabo USB Tipo C (para programar o Arduino)
- Fonte DC Chaveada 5V ou Fonte DC Chaveada 12V
- Jumpers
Circuito para controlar a velocidade do motor DC utilizando uma ponte H
A seguir, é apresentado o esquema de ligação da ponte H L298N ao Arduino Uno R4 para controlar a velocidade de um motor DC.

Observações Importantes:
- Caso esteja utilizando o motor conectado nas saídas OUT1 e OUT2, mantenha o jumpers ENA conectado.
- Caso esteja utilizando o motor conectado nas saídas OUT3 e OUT4, mantenha o jumpers ENB conectado.
- Ao utilizar uma fonte externa, mantenha conectado o jumper 5VEN.
- Para alimentar o módulo L298D, utilize uma fonte de alimentação compatível com a tensão de alimentação do motor. Por exemplo, se estiver utilizando um motor de 5V, use uma fonte 5V. Se estiver utilizando um motor de 12V, use uma fonte de 12V.
- Conecte o GND da fonte ao GND da placa Arduino.
- Não esqueça de alimentar a placa Arduino.
Código para controlar a velocidade do motor DC utilizando uma ponte H
Aqui está um código para o Arduino que controla a velocidade e o sentido de rotação de um motor DC usando PWM e um módulo de ponte H, como o L298N. O código utiliza dois pinos PWM da placa Arduino para controlar a direção e a velocidade do motor DC.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
// Programa: Controle de velocidade e direção de um motor Dc utilizando o módulo L298D // Define os pinos de controle do motor ligados ao Arduino #define PINO_IN1 5 // Pino responsável pelo controle no sentido horário #define PINO_IN2 6 // Pino responsável pelo controle no sentido anti-horário void setup(){ // Configura os pinos de controle como saída pinMode(PINO_IN1, OUTPUT); // Define o pino IN1 como saída pinMode(PINO_IN2, OUTPUT); // Define o pino IN2 como saída } void loop() { int valor_pwm = 0; // Variável para armazenar o valor PWM (0-255) // Aumenta a velocidade gradualmente de 0% a 100% no sentido horário for (valor_pwm = 0; valor_pwm < 256; valor_pwm++) { analogWrite(PINO_IN1, valor_pwm); // Aplica o valor PWM no pino IN1 delay(100); // Espera 100 ms antes de aumentar a velocidade } // Diminui a velocidade gradualmente de 100% a 0% no sentido horário for (valor_pwm = 255; valor_pwm >= 0; valor_pwm--) { analogWrite(PINO_IN1, valor_pwm); // Reduz o valor PWM no pino IN1 delay(100); // Espera 100 ms antes de diminuir mais a velocidade } // Aumenta a velocidade gradualmente de 0% a 100% no sentido anti-horário for (valor_pwm = 0; valor_pwm < 256; valor_pwm++) { analogWrite(PINO_IN2, valor_pwm); // Aplica o valor PWM no pino IN2 delay(100); // Espera 100 ms antes de aumentar a velocidade } // Diminui a velocidade gradualmente de 100% a 0% no sentido anti-horário for (valor_pwm = 255; valor_pwm >= 0; valor_pwm--) { analogWrite(PINO_IN2, valor_pwm); // Reduz o valor PWM no pino IN2 delay(100); // Espera 100 ms antes de diminuir mais a velocidade } } |
Explicação do código:
- Pinos IN1 e IN2: Controlam o sentido de rotação do motor. O IN1 é para o sentido horário, e o IN2 para o anti-horário.
- Valor PWM: É usado para controlar a velocidade do motor, variando de 0 (0% de velocidade) até 255 (100% de velocidade).
- Loop: O código aumenta e diminui a velocidade do motor primeiro no sentido horário e depois no sentido anti-horário, aplicando valores PWM gradativamente.
Funcionamento do circuito para controle de velocidade utilizando uma ponte H
Ao ligar o circuito com base no código fornecido, o motor DC será acionado da seguinte maneira pela ponte H (Driver Motor Ponte H L298n):

- Início do Movimento: O motor começará a girar no sentido horário. A velocidade será aumentada gradualmente, partindo de 0% (parado) até atingir 100% da rotação máxima, controlada pelo valor do PWM que varia de 0 a 255.
- Redução da Velocidade: Após atingir a velocidade máxima no sentido horário, o motor começará a desacelerar, reduzindo gradativamente sua rotação de 100% até parar completamente, com o valor do PWM voltando de 255 para 0.
- Mudança de Sentido: Uma vez que o motor esteja parado, ele irá começar a girar no sentido anti-horário, novamente com a velocidade aumentando de 0% até 100%. Isso é controlado pelo PWM aplicado ao segundo pino (IN2).
- Desaceleração no Sentido Anti-horário: Após atingir a velocidade máxima no sentido anti-horário, o motor reduzirá gradualmente sua rotação, voltando a parar completamente.
Este ciclo se repetirá continuamente, alternando entre o aumento e diminuição de velocidade nos dois sentidos de rotação.
Se você tiver dúvidas, sugestões ou experiências para compartilhar, fique a vontade para deixar um comentário abaixo. E para não perder nenhum conteúdo como este, não deixe de nos seguir no Instagram.
opa, teria como eu usar um receptor HY-4R17T-1 com saídas (MB, MF, MR, ML) para eu controlar um futuro porjeto de um carrinho? base controle RF?
Olá Blaster,
Sim, é possível! Você pode ligar as saídas MF, MB, ML e MR do receptor HY-4R1T-1 diretamente nas entradas da ponte H L298N (IN1, IN2, IN3, IN4) para controlar a direção do carrinho via controle RF. Só lembre de ligar corretamente os motores e a alimentação!
Um abraço!
Leandro – Equipe Makerhero
Nas linhas onde tem a menção “Para motor” o estado não deveria ser “LOW” ao invés de “HIGH”? Pois queremos que a energia do motor seja desligada para fazer a alteração de rotação do motor. Parabéns pelos conteúdos, tem me ajudado muito!
Bom dia.
Nesse caso realmente é “HIGH” pois esse sinal passa pelo driver, e não vai direto para o motor. Ai o driver é que manipula esse sinal e gira os motores.
Att.
Vitor Mattos.
Suporte Técnico MakerHero.
Mas se ambos os pinos recebessem LOW / LOW não funcionaria? O motor ficaria em PONTO MORTO em vez FREIO, seria isso?
Olá.
É que não é necessário escrever “LOW” no par de comando do motor, basta apenas escrever “HIGH” no motor que você quer comandar.
Em outras palavras:
Há 4 comandos, um par para cada motor. Se eu quero acionar o motor A e manter o B desligado, basta eu escrever “HIGH” para os comandos do motor A, ou seja, não é necessário eu escrever “LOW” para os comandos do motor B.
Uma linha de código escrito “LOW” para um mesmo motor é a mesma coisa que não escrever nada, pois a saída estará sempre em “LOW” a não ser que o código envie o comando “HIGH”.
Att.
Vitor Mattos.
Suporte Técnico MakerHero.
Boa tarde! Teria algum Sketch que eu consiga controlar os motores via SERIAL MONITOR?? TIPO DE 0% A 100%?? conforme a porcentagem aumenta ou diminui altera a rotação dos motores no SERIAL MONITOR.
Olá.
Favor entrar em contato conosco no [email protected].
Att.
Vitor Mattos.
MakerHero.
Oi meu xará boa tarde !
Estou tendo dificuldade em meu projeto .
Tenho que colocar um motor com o seguinte funcionamento: botão ligando avançando até um sensor que o reverte até outro sensor com proteção de fim de curso caso não pare . E um potenciometro para controlar a velocidade.
Sou novo em mexer com arduino mas tenho muitas expectativas a respeito deles .
Se puder me ajudar fico extremamente grato :
Olá.
Favor entrar em contato conosco no [email protected].
Att.
Vitor Mattos.
MakerHero.
Oi, tudo bem?
Eu estou realizando um projeto que comanda por voz um robô utilizando da ponte H e de dois motores DC, porém eu precisaria controlar a angulação desse robô para que ele virasse conforme o angulo que eu informasse, pois atualmente se mando para a direita ou esquerda ele roda infinitamente, então gostaria de saber se vocês podem me informar alguma maneira para que eu possa realizar isso.
Olá Felipe,
Para fazer esse controle você precisa ou utilizar um motor de passo, que você consegue ter uma precisão do ângulo de rotação: https://www.makerhero.com/blog/controlando-um-motor-de-passo-5v-com-arduino/
Ou usar algum tipo de feedback de posição do motor.
Um exemplo de feedback você pode encontrar aqui: https://www.arduinoecia.com.br/motor-dc-com-encoder-arduino/
Abraços!
Vinícius – Equipe MakerHero
Olá, gostaria de saber qual foi o motor dc utilizado no projeto.
Olá Emanuel,
Nas fotos aparecem um motor modelo 25GA370, mas pode utilizar qualquer par de motores DC, desde que respeitados os limites de tensão e corrente da ponte H.
Abraços!
Vinícius – Equipe MakerHero
Não é então possível controlar a velocidade de um motor quando ele é alimentado externamente?
Olá Ramiro,
É possível sim, o driver recebe o sinal do arduino e chaveia a alimentação externa, então se você enviar um sinal PWM a saída também será em PWM, desde que respeitados os limites de transição de sinais do driver.
Abraços!
Vinícius – Equipe MakerHero
Boa noite! Preciso de uma ajuda, cometi um erro de principiante, utilizo essa mesma ponte h à mais de dois anos, inclusive comprei pelo site da MakerHero, mas acabei por distração, ligando +12v no born de alimentação externa de +5v, gostaria de uma ajuda de como identificar se o Ci da ponte h queimou ou só o regulador de tensão da placa, no caso do CI estiver intacto, como posso fazer um novo circuito, pois preciso utilizar ela para controlar os eixos x e y do meu telescópio Metade ETX 70. Ela funcionava perfeitamente, até eu cometer esse erro de principiante. Será que só queimou o regulador de tensão? Como fazer pra testar só o CI? Pôr favor, preciso de uma ajuda!
Olá Cristiano,
Infelizmente é praticamente certo que queimou o CI, pois ele recebe uma alimentação lógica de, no máximo, 7V e que está diretamente conectada ao pino de 5V externo.
Você pode verificar a continuidade entre o pino de 5V e o GND sem o jumper inserido na placa. Caso haja um curto, é no L298.
Abraços,
Vinícius – Equipe MakerHero
Eu fiz o projeto,mas o com 5V não funcionou,apenas o 12v.Ja tentei de várias formas,usando 5V e GND do arduino,fonte externa de 5V com GND interligado no arduíno,saberia o porque disto?
Consegui resolver,o 5v tem que ser ligado na entrada 5v e também na entrada positiva,no esquema elétrico está apenas mostrando que deve ligar o 5V do arduíno na “saída” 5V do driver.
meu email [email protected]
Bt Adilson Thomsen sou hobysta e estou tentando montar uma chocadeira so q ate o termometro tudo ok so q estou enrolado na hora do motor para viragem dos ovos na minha sketch eu queria q o motor so funcionasse de meia e meia hora e nao consigo vc pode me ajudar ?
#include // LCD library using from https://www.ardumotive.com/i2clcden.html for the i2c LCD library
#include
int lmp1 = 10;
int lmg = 11;
#define dados 3
#define Max 29
#define Min 28.5
#define led 13
OneWire oneWire(dados);
LiquidCrystal_I2C lcd(0x27,16,2); // set the LCD address to 0x27 after finding it from serial monitor (see comment above) for a 16 chars and 2 line display
DallasTemperature sensors(&oneWire);
void setup()
{
Serial.begin(9600);
pinMode(led, OUTPUT);
lcd.init();
// Print a message to the LCD.
lcd.backlight();
lcd.setBacklight(HIGH);
sensors.begin();
}
void loop(){
lcd.setCursor(0,0);
lcd.print(” Choc Plus”);
sensors.requestTemperatures();
lcd.setCursor(1,1);
lcd.print(“A temp = “);
lcd.print(sensors.getTempCByIndex(0));
if (sensors.getTempCByIndex(0) > Max) {
digitalWrite(led, HIGH);
}
if (sensors.getTempCByIndex(0) < Min)
digitalWrite(led, LOW);
delay(1000);
digitalWrite(lmp1,HIGH);
delay(100);
digitalWrite(lmp1,LOW);
delay(10000);
digitalWrite(lmg,HIGH);
delay(100);
digitalWrite(lmg,LOW);
delay(10000);
}
Olá!
Para uma chocadeira acredito que seria interessante utilizar o módulo RTC para ter um controle mais preciso de tempo, mas você pode utilizar a função millis() para determinar a cada quanto tempo o motor é girado.
Temos uma explicação sobre essa função neste post aqui: https://www.makerhero.com/blog/subtituindo-delay-por-millis-no-arduino/
A função millis utlizia milissegundos, então para converter de minutos para milissegundos você precisa multiplicar por 60000.
Abraços!
Vinícius – Equipe MakerHero
Ola.
Gostei deste exemplo.
Mas tenho duvidas: estou montando um circuito com duas pontes, onde uma acionará dois motores de 24V. E a outra, um motor de 12V.
1. Posso ligar as duas pontes no mesmo arduino?
2. Se sim, e como são fontes de tensões diferentes, como usar o fio do GND da ponte no arduino?
Desde já, grato.
Olá Vagner,
Sim, pode ligar as duas pontes no mesmo Arduino, sem problemas.
O GND é a tensão de referência do circuito, então o GND do Arduino e das duas pontes devem estar conectados entre si, para que todos tenham o mesmo referencial.
Abraços!
Vinícius – Equipe MakerHero
Muito bom projeto, já utilizei e ficou muito legal.
Adilson tudo bem? Estou olhado sua simulação e tentando replicar em um projeto meu de pendulo, porem não estou conseguindo fazer o controle dele que no caso seria um pouco diferente mas no final das contas usa a mesma logica, estou usando um encoder para ler a posição do eixo do motor e utilizando somente um motor com tensão 12v, ou seja o eixo do motor precisa voltar para um posição definida que e o ângulo de 90 graus mesmo depois de qualquer interferência. Será que você consegue me ajudar nesse problema ou tem algum tópico que você utilizou que possa me ajudar ?
Olá Leonardo,
Acho que uma forma de resolver seria deixar um degrau maior no encoder no ângulo de 90 graus, como é feito nos sensores de rotação de motores de carro, para que você saiba, além da rotação, em que posição é o seu “zero de referência”. Assim você tem controle do número de voltas, e se está no ponto zero ou não
Abraços!
Vinícius – Equipe MakerHero
Excelente!! Grato pela partilha deste conhecimento. Tenho um problema com um dos equipamentos que ando para resolver há algum tempo e esta solução vai ajudar a resolver.
Olá João,
Que bom que o conhecimento vai te ajudar, qualquer coisa conte com a gente!
Abraços!
Vinícius – Equipe MakerHero
Ola.
Preciso ligar dois atuadores de 24v, com botao de pulsar.
Como faço a programação dos mesmos?
E no tinkercad nao tem o L298 (pelo menos nao achei).
Desde já, grato pela atenção.
Olá Vagner,
Nós geralmente utilizamos o Fritzing para os diagramas.
Abraços!
Vinícius – Equipe MakerHero
Boa noite gostaria de uma ajuda como ligar um motor de 36v dc de um rocadeira importada
Olá Francisco,
A faixa de tensão desse módulo é de 4 a 35 V, portando esse motor de 36 V estaria fora da faixa de operação e poderia causar danos ao módulo.
Acredito que a forma mais simples seria utilizando um relé, caso não queira controlar a velocidade do motor.
Abraço!
Vinícius – Equipe MakerHero
Fazes programaçao do rduino sobre encomenda?
Olá Gilvan,
Não fazemos projetos sob encomenda.
Abraços!
Vinícius – Equipe MakerHero
ola posso controlar um unico motor dc com um modulo desse e ha alguma diferença entre esse e o mini
Olá Victor,
Se desejar, você pode controlar apenas um motor DC.
Abraço!
Rosana – Equipe MakerHero
Qual drive é indicado para acionar 4 motores DC.
Olá David,
Caso esteja usando um Arduino Uno, indico que utilize esse shield aqui: https://www.makerhero.com/produto/motor-shield-l293d-driver-ponte-h-para-arduino/
Abraço!
Rosana – Equipe MakerHero
Muito bem pensado 5 estrela.
Olá Misael!
Muito bom saber que você gostou!
Abraço!
Rosana – Equipe MakerHero
Muito bem pensado 5 estrela
Olá ! Se eu usar esse módulo para um motor 12V, significa que eu consigo controlar a tensão apenas entre 6 e 12V , e não de 0 a 12V ? Nesse caso, o motor já partiria com 50% da velocidade nominal ? Ou seja, eu só controlaria de 50 a 100% da velocidade.
Olá, fiz as ligações corretamente e subi o sw para o Uno, mas os motores nao estão girando.
Ja chequei as saídas dos pinos do Uno e estão sendo acionadas.
Chequei o motor, ligando direto 5V e GND, nos 2 lados, e eles estão girando corretamente para ambos os lados, mas ao usar a ponte H não ocorre acionamento nos Outs 1 a 4.
Testei com o multimetro e realmente as saidas Out1 a 4 estão sempre em 0V.
Como eu testo se minha ponte H não está queimada ?
Coloquei uma fonte externa, de 7.4V e está funcionando (Conectei o jumper dos 5V). Acho que o arduino não tem corrente suficiente para os motores.
Tudo certo agora
Leandro, é isso mesmo. O Arduino envia uma corrente muito baixa para a utilização dos motores.
Abraços!
Diogo – Equipe MakerHero
Eu preciso usar 2 atuadores lineares que operam com tensão 12V. Motor de 5w.
É possível ligar esse 2 atuadores no mesmo L298N ? E serem acionados por sensores LDR,s? É para um seguidor solar! Pode me ajudar com os códigos e esquema de ligação para este controle?
Eu preciso usar 2 atuadores lineares que operam com tensão 12V. Motor de 5w.
É possível ligar esse 2 atuadores no mesmo L298N ? E serem acionados por sensores LDR,s?
Bom dia gostei do seu projeto sou estudante de engenharia como Faço p instalar bluetoh neste projeto
Gilson,
Dê uma olhada neste link, deve te ajudar: https://www.makerhero.com/blog/tutorial-modulo-bluetooth-com-arduino/
Abraços!
Diogo – Equipe MakerHero
Bom dia, Existe a possibilidade de iniciar o motor em uma velocidade fixa (lenta) e ir incrementando com um botão?
Paulo,
Sim, você pode fazer essa condição pelos códigos.
Abraços!
Diogo – Equipe MakerHero
Referência dos motores?
Nos ensina pf a fazer este processo removendo a parada de motor e acionar os comando para frente e para traz e controlando por um disposto Bluetooth no celular Iphone
Posso ligar em paralelo as entradas é saídas 1e3, 2e4
Para suportar 3,5a de corrente?
boa tarde, adilson
Gostaria de usar este programa para usar numa sala para subir e desce tanto o motor para o telão, quanto o motor para o projetor com uso de um botão tipo push button é possível e se vc pode me ajudar.
Muito bom eu posso usar para alimentar um motor só de 12 volt
Antonio,
Pode sim!
Abraços!
Diogo – Equipe MakerHero
Boa Tarde.
Estou usando somente 1 Motor na porta A do L298N, para abrir e fechar uma porta do meu projeto, com acrescentar 2 micro switch.
* Um quando a porta fechar até o final (corta a alimentação)
* E o outro quando a porta abrir ate o limite final (corta a alimentação).
Obs: como fazer a ligação desse esquema no arduino.
Bom dia, estou encontrando algum problemas com minha ponte h. Ao acionar motores 12 volts, tudo ocorre perfeitamente. Porem, ao tentar acionar um motor 5 volts, não consigo obter potencia. Quando tiro o jumper ”ativa 5v”, o motor nem sequer aciona. Experimentei deixar o jumper conectado, e o motor enfim partiu, porem muito fraco. Estou usando 5 volts do arduino para o acionamento.
Rodrigo,
Isso ocorre porque a tensão de 5V do Arduino esteja um pouco abaixo do ideal, causando lentidão no motor. Deves verificar com um multímetro se está realmente recebendo 5V.
Abraços!
Diogo – Equipe MakerHero
Boa tarde amigo, é normal a ponte h esquentar? Estou trabalhando com uma e de repente ela parou de esquentar e não liga mais o motor de passo nema 17. Será que queimou? Ele ainda passa tensão, mas não fornece ao motor.
Erik,
Qual a tensão sendo fornecida para o motor? Você chegou a medir?
Abraços!
Diogo – Equipe MakerHero
Oi Pessoal!
sou professora de Matemática e me encantei com projetos com Arduino. Adoooooro este site e utilizo com meus estudantes. Gostaria de tirar uma dúvida com vocês: No primeiro circuito apresentado aqui no site, eu monto tudo direitinho, mas o motor não gira de jeito nenhum. No circuito a ideia é que o motor seja alimentado pelo Arduino. Mas o motor nem treme!!! Aí, troco pela bateria de 9v e ele funciona. Meu motor é de micro-velocidade (3-6V DC). No circuito de vocês fala que o motor precisa ser DF de 5v. Agradeço a atenção e o retorno.
Cleia,
Você testou com o jumper na placa? Por seu motor funcionar em até 6V, pode ser que quando está sem jumper acaba não ativando o motor.
Abraços!
Diogo – Equipe MakerHero
Bom dia, estou a procura de um projeto p controlar um motor DC de 12v, como se ele fosse um motor de passo, ele recebe a leitura de um sensor de posição e faz a angulação conforme o que recebe, esse motor possui um sistema de engrenagem para diminuir a rotação, o motor trabalhará nos dois sentidos num ângulo máximo de 60°. O que recomendaria, pois acredito que a ponte H não funcionaria só em determinado ponto.
E-mail: [email protected]
Jefferson,
Aconselho você a postar sua ideia de projeto lá no nosso fórum.
Abraços!
Diogo – Equipe MakerHero
Boa noite!
Estou com um esquema parecido com controle de velocidade pwm porém a rotação dos motores é muito fraca independente da alimentação, a ponte h permite o aumento de corrente para aumentar o torque dos motores ?
obs: eles contém redutorews.
Matheus,
Você pode aplicar até 2A por canal ou 4A se usar os dois canais como um só.
Abraços!
Diogo – Equipe MakerHero
Olá Adilson.
Parabéns pelo post.
Vc tem o código que controla a velocidade?
Abs.
Adilson Boa noite
Muito bom.
Estou com um equipamento, de laboratório de quimica, p/ manutenção, e a ponte H foi trocada, Uma L298N, esta comanda um motor de passo. Junto temos um L6506 e um DAC 8228 da ANALOG DEVICE. Quando colocamos os parametros no equipamento, p/ que comece a executar o serviço, este inicia e logo para dando uma mensagem STALLED ou seja ( PARADO). Este equipamento e uma bomba de infusão. Um equipamento p/ adicionar liquido a uma substancia atravém de uma seringa, presa o aparelho, a qual sofre uma pressão quando o motor de passo gira com os parametros colocados na memória.
Pergunto: É necessário efetuar a programação desta ponte H p/ que este aparelho funcione.
João,
Você teria de fazer uma programação em que, assim que necessário adicionar o líquido, fazer com que o motor gire e efetua a operação que deseja.
Abraços!
Diogo – Equipe MakerHero
bomdia senhor Adilson, tenho intenção em controlar um motor DC12V na seguinte oporação.
Olá, Francisco,
Pode usar um motor de 12V sem problemas.
Abraços!
Diogo – Equipe MakerHero
Posso utilizar o Arduino DUE para trabalhar com esta placa? Pois o Due as saídas de PWM são 3,3V ….
Olá, Henrique,
A tensão de operação dele é de 5V 🙂
Abraços!
Diogo – Equipe MakerHero
Apesar de iniciante no Arduino, achei bem interessante a solução e a publicação extremamente didática.
Olá, Julio!
Que bom que você gostou 🙂 Espero que continue explorando o #movimentoMaker cada vez mais!
Abraços!
Diogo – Equipe MakerHero
Olá! Alguma solução para utilizar este controlador, mas com acionamento sem fio? Agregando algum módulo com wifi ou bluetooth por exemplo?
Aguardo resposta e, desde já, agradeço!
Olá, Ricardo!
Existe a possibilidade sim! Na internet existem alguns projetos que você pode dar uma conferida sobre ligar essa ponte H com módulos Wifi para controlar pelo celular por exemplo 😉
Abraços!
Diogo – Equipe MakerHero
Olá, com os pinos enable com jumpers ainda é possível controlar velocidade ? Colocando iOS outros em pwm e usando analogWrite ? Por exemplo : analogWrite(IN1, 180); . Obrigado pela aula. A explicação está muito didática .
Olá, Gerson,
Como detalhado no post, se o Enable estiver com jumper, não há controle de velocidade 😉
Abraços!
Diogo – Equipe MakerHero
Boa noite, estou montando um carrinho e gostaria de saber se você tem alguma biblioteca de programação usando ponte H e módulo Nrf24l01 para controlar o carrinho sem fio com joystick com aceleração controlada meu Arduino é pro mini, agradeço se poder me ajudar, pois na parte de programação do Arduino não sei.
Parabéns, simples , clara e objetiva explicação.
Olá Cid,
É muito bom saber que nosso conteúdo pode te ajudar!
Abraço!
Rosana – Equipe MakerHero
ola sou novo nesse mundo do arduino!
tenho algum conecimento em programacao e em eletronica.
montei um sistema simples que vai um servo e um LCD display e inicialmente um botao.
primeiro estava tentando somente o servo mas nao sei se esta faltando algo ou o modelo que estou usando seria muito diferente do que mostra aqui no blog.
aparentemente a parte fisica esta em ordem os fios no lugares certo e tudo mais tento usar o codigo que voce disponibiliza no blog mas coloco no programa pelo computador testo se esta bem o codigo em relacao ao arduino. vai e faco o upload mas nada acontece depois disso.
atualmente meu foco eh em construcao em metais mas um projeto que estou fazendo preciso colocar um sistema de “automacao” que tem um LCD display para confirmacao quando aperta um botao e girar um servo 90 graus esperar alguns segundos e voltar ao ponto iniicial.
acredito que tenho todas as partes e cabos que comprei o kit arduino e algumas coisas complementares caso precisa-se.
Olá Davi,
Sugiro você testar seu projeto em partes.
Primeiro faça um programa para ativar o servo usando um botão. Veja essa aula: https://www.makerhero.com/aula/7-5-acionando-um-servo-motor/
Depois faça um programa para mostrar mensagem no display LCD. Veja esse post: https://www.makerhero.com/blog/controlando-um-lcd-16×2-com-arduino/
Depois que você entender como funciona cada um dos programas, você pode juntar tudo.
Abraço!
Rosana – Equipe MakerHero
Olá, sou muito novo em arduino, e tenho em mente em fazer um projeto com o seguinte: Seria um “slider” para câmera de fotografia, então teria que ter um controle de velocidade (de rotação do motor) e um controle de direção (esquerda e direita)
Já possuo um Nema 17 um arduino Uno e uma ponte L298N. Além disso tenho um lcd keypad shield 16X2. Testei vários códigos, mas sem sucesso de achar um que pudesse fazer esses controles. Poderia me indicar algum código para que eu finalize meu projeto? De preferência que conseguisse usar o LCD Shield (para visualizar velocidade e direção) e em conjunto com o arduino e motor Nema 17. Muito obrigado.
Nâo consigo interligar a ponte H L298N ao arduno.
tem que baixar algum drive da ponte H L298N?
Olá Paulo,
Você seguiu o tutorial? Você está tentando montar o primeiro ou o segundo circuito?
Abraço!
Rosana – Equipe MakerHero
Boa tarde, gostaria de saber se é possivel usar apenas um motor de 12vDC em apenas uma saída da sua ponte H de forma a conseguir os 4A.
Se sim, isto ocorrerá de forma automatica ou tenho que fazer alguma configuração?
Olá,
Você terá 4A sem precisar fazer nada.
Abraço!
Rosana – Equipe MakerHero
mto bom. vou usar. estou montando um seguidor solar.
Olá Paulo,
Que bom que gostou! Boa sorte no projeto 😀
Abraço!
Rosana – Equipe MakerHero
Gostaria de controlar com o celular usando o módulo hc-05. Quando eu mando o motor girar ele não pára mesmo quando eu solto o botão do aplicativo. Gostaria que ele só girasse enquanto eu estou apertando o botão.
O circuito aceita 35 V na alimentação?
Olá Haroldo,
A máxima tensão de alimentação é de 35V.
Abraço!
Rosana – Equipe MakerHero
bom dia amigo gostei tanto desse projeto que acabei me interessando pelo Arduíno, como sou formando em técnico em mecânica gosto de fazer alguns projetos o Arduíno fará parte da minha vida agora, estou procurando um curso de Arduíno aqui no rio de janeiro, já comprei no site um Arduíno uno, ponte h, push buton e outras coisas para dar inicio a um projeto de um sistema motriz, só uma duvida, eu consigo programar um sistema de rampa de aceleração com Arduíno como ocorre nos soft starter?
Olá,
Acredito que seja possível fazer algo semelhante 😀
Boa sorte no projeto!
Abraço!
Rosana -Equipe MakerHero
Achei muito interessante e útil esse site. Obrigado pelo conteúdo.
Olá André,
É muito bom saber que você gostou do nosso trabalho!
Abraço!
Rosana – Equipe MakerHero
Boa tardee possível montar um kit de arduíno para acionar uma lanterna de 12v com um sensor de chuvas. Minha ideia e ter uma lâmpada traseira de nevoeiro que aciona automaticamente assim evitando colisão traseira assim que passar a chuva a lâmpada desligar
Olá Marcelo,
Acredito que esse post vai te ajudar: https://www.makerhero.com/blog/sensor-de-luz-ldr-com-rele/
No caso você precisaria substituir o sensor de luz por um sensor de chuva.
Abraço!
Rosana – Equipe MakerHero
Boa noite Adilson.
Como posso inserir no Arduino o LCD para informar o valor minimo e máximo da corrente?
Olá Haroldo,
Primeiramente é necessário medir a corrente com um sensor de corrente. Assim, você terá uma variável que poderá ser enviada para o LCD.
Abraço,
Rosana – Equipe MakerHero
Boa Noite
Adilson Thomsen vi seu artigo a respeito do teste de uma ponte h, gostaria muito de sua ajuda, não sei mais o que fazer, não estou conseguindo monta robô sumo autônomo, ele tem ligar esperar 5 segundos e ai começar a batalha, não faço ideia de como programar e se quer montar na placa do Arduino, poderia me ajudar por favor, desde jã agradeço por sua atenção e ajuda, Deus abençoe.
Att: Gilberto Araujo
Olá Gilberto!
Você já fez outros projetos com Arduino? Pode ser que o que você esteja fazendo seja muito complicado para o que você tem de conhecimento no momento, acho que vale brincar um pouco mais com o arduino antes de partir para esses projetos mais rebuscados.
Abraços!
André – Equipe MakerHero
Show. mas para ficar melhor poderia ter o datasheet da placa completa com todas as ligações possíveis grato
Olá Saadi!
Pode dar uma olhada neste datasheet:
https://www.makerhero.com/img/files/download/Datasheet_L298_Ponte_H.pdf
Abraços!
André – Equipe MakerHero
Não estou conseguindo controlar a rotação de motor dc utilizando as entradas enA e enB do L298, apenas com os jumpers colocados e utilizando in1 ou in2 num pino pwm (~). Como posso fazer não rodam os sketh e já testei em outro L298. Grato pela atenção.
Olá Carlos!
Já deu uma olhada neste post?
https://www.makerhero.com/blog/controle-motor-dc-pwm-arduino-uno/
Acho que é mais o que você precisa né 🙂
Abraços!
André – Equipe MakerHero
Boa noite posso ligar motor de impressora tanto girar pra frente e pra tras
Olá Clério!
Sim.
Abraços!
André – Equipe MakerHero
Poderia ame ajudar a entender as diferenças entre o L298n e o L9110s? E o que devo utilizar para construção de um veiculo sobre lagartas?
Olá Luciano!
O L298N suporta muito mais corrente (mais que o dobro).
Sobre o veículo, você deve montar o projeto e ver o que melhor se encaixa.
Abraços!
André – Equipe MakerHero
Parabéns pelo post, saberia me indicar alguma ponte-H para Arduino com suporte até 6A? Pois pelo que entendi essa ponte suporta ate 2A
Olá Lucas!
6 A em cada canal ou na soma dos dois?
Aqui na MakerHero não temos. Tem como você usar um mosfet para isso. Meio que fazer sua própria ponte.
Abraços!
André – Equipe MakerHero
Bom dia. Minha ponte H esta girando um motor mais rápido que o outro. os conectores da ponte H out 1 e 2 estão liberando uma carga de 6,31 v e o motor que esta conectado gira mais rápido.Os conectores out 3 e 4 estão liberando uma carga de 7 v e o motor que está conectado gira mais divagar. Oque eu posso fazer pra resolver?
Olá Danilo!
Como você está medindo? O programa é mesmo deste post? Os motores estão sem nada acoplado?
Abraços!
André – Equipe MakerHero
bom dia. na verdade isso acontece com todos os programas que eu faço que utilize a ponte h esse também fez um motor girar mais rápido que o outro . eu estou fazendo um carrinho de controle remoto controlado por Bluetooth e a ponte h continua fazendo o mesmo.
essa e a programação oque eu posso alterar pra fazer os motores girarem na mesma velocidade?
#include
SoftwareSerial bluetooth(2, 3);
int IN1 = 4;
int IN2 = 5;
int IN3 = 6;
int IN4 = 7;
char comando;
void setup() {
bluetooth.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
while (bluetooth.available()) {
comando = bluetooth.read();
if (comando == ‘f’) {
frente();
}
else if (comando == ‘b’) {
tras();
}
else if (comando == ‘l’) {
esquerda();
}
else if (comando == ‘r’) {
direita();
} else {
parado();
}
}
}
void frente() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void tras() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void esquerda() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void direita() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void parado() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
}
Danilo!
Quando você manda para frente o carrinho, você pode, ao invés de manter os dois ligados, desligar uns instantes o que roda mais rápido. Aí compensa a diferença.
Abraços!
André – Equipe MakerHero
Estou montando um carrinho tb e estou com o mesmo problema. Conseguiu solucionar?
Não sei se você conseguiu resolver, tinha o mesmo problema com um shield ponte H, resolvi montando a ponte h diretamente no CI l293, notei que não tenho perda significativa de velocidade em nenhum dos motores, antes eu controlava manualmente fazendo a compensação para cada motor mas nunca ficava exato. Abraços.
Olá amigo estou começando agora a projetar alguma coisa em arduino, achei sua matéria muito interessante, mais gostaria de saber se podes me ajudar, estou com um projeto que é um seguinte, ponte h dois motores um motor será para fazer o projeto ir para frente e para traz e o outro motor sera para fazer o direcional, estou com dúvidas como fazer isso, eu tenho quatro botoes que seria o meus Joystick, poderia me ajudar com o código? Desde já muito obrigado
Olá Max!
Seu motor é de que tipo?
Se for DC, como o do post, é só inverter a polaridade dele. Como é feito neste post.
Se for de passo é necessário invertar a ordem de acionamento dos passos.
https://www.makerhero.com/blog/controlando-um-motor-de-passo-5v-com-arduino/
Abraços!
André – Equipe MakerHero
Mano, você precisa além do motor dc, de preferência um com a caixa de redução e dois eixos: https://www.makerhero.com/produto/motor-dc-3-6v-com-caixa-de-reducao-e-eixo-duplo/
também de um servo motor acoplado a uma rodinha para controlar a direção, como esse: https://www.makerhero.com/produto/servo-tower-pro-sg-5010-acessorios/
Olá, o tutorial está perfeito
Mas estou com um pequeno problema: O meu motor é de 60W e essa ponte é de 25W
O que devo fazer ?
Olá Matheus!
Você precisará de uma ponte mais robusta ou reduzir a potência enviada para o seu motor.
Abraços!
André – Equipe MakerHero
Boa noite tô com dificuldade em fazer um programa pois tenho um sevo moto e um motor DC e uma ponte h e um módulo Bluetooth para fazer um carrinho de controle e não consigo fazer o código para Arduino uno poderia me ajudar
Olá Leonardo!
Dependendo do seu servo você pode ligá-lo direto na placa arduino!
O motor DC pode ser acionado como no tutorial. Já o módulo Bluetooth você pode ver aqui: https://www.makerhero.com/?s=bluetooth&post_type=post
Sugiro fortemente você fazer os testes com os produtos separados
Abraços!
André – Equipe MakerHero
pra usar o máximo de 4 amperes eu preciso ligar em parelo as saidas?
Olá Daniel!
Você só consegue ligar 2 A por canal, para 4 A teria que ser um motor de passo.
Não tem como ligar um motor DC com 4 A, por exemplo.
Abraços!
André – Equipe MakerHero
Planejo lihar 2 motores de 6v mas colocando 9v neles por um periodo de 3min, essa ponte h suporta?
Olá Helanio!
A tensão ele suporta, você tem que ver a corrente consumida. Ele suporta até 2 A por canal.
Abraços!
André – Equipe MakerHero
como faço para controlar a rotação dos motores por botão ?
Olá Leandro!
Só colocar um if(botao) dentro da sua programação!
Abraços!
André – Equipe MakerHero
O que voce recomendaria usar se em um projeto usasse 3 motores DC e 2 servo.
Olá Germano!
Até poderia usar, mas precisaria de mais de uma ponte l298n.
Abraços!
André – Equipe MakerHero
Consigo controlar motor Mabuchi (vidro elétrico) com um L298N?
Olá Diego!
Você deve verificar as especificações do motor e comparar com o do L298N.
Abraços!
André – Equipe MakerHero
Estou fabricando um robô humanoide……e vou colocar esses sistemas nos pés…….vou precisar de seus conhecimentos….. agradeço. Muito..
Boa noite,
Você teria como encaminhar o esquema de ligação de um segue faixa e desvia de obstaculos, com o módulo de 4 sensores, ultrassom e servo.
Obrigado.
amei
Olá, no segundo esquema de ligação é possível conectar um cabo no 5v da ponte H e o outro no pino VIM do arduino (para energizar o arduino sem ser pelo cabo usb ou conector jack).
Se for possível é necessário deixar quais jumpers na ponte H?
Obrigado.
Olá Rafael!
Quando a alimentação é do arduino retira o jumper, quando não é você mantém o jumper do ativa 5 V.
Abraços!
André – Equipe MakerHero
Que software é esse que vcs fazem os esquemas eletricos?
Olá Gregory!
Usamos o Fritzing, é bem bom e gratuito!
Abraços
André – Equipe MakerHero
Boa noite! Gostaria de saber como posso ligar uma ponte H com um motor de 12 v com um de 5v? Teria que usar duas ponte H? Posso usar a saída da ponte H , onde vai o 12 v, do regulador que me dá uma tensão de 5v?
Olá , eu posso fazer rodar os dois motores ao mesmo tempo através de um controle…pela placa de Arduino, é que estou trabalhando em projeto com esteira lagarta …então tinha que usar dois motores que trabalhasse individualmente…
Se forem motores DC tem como fazer os dois rodarem ao mesmo tempo, se for de passo só dá pra usar um por vez.
Abraço!
Olá, eu gostaria de alimentar motores 5v utilizando uma fonte de 12v, teria sugestões de como proceder? abraços!
Boa tarde vcs poderiam fazer um vídeo usando apenas a ponte H seria interessante isso sem usar o Arduino o isso não é possível fazer
Boa tarde teria como vcs fazer um vídeo sem ter que usar o Arduino usando apenas a ponte H seria interessante isso o isso não é possível fazer
Minha ponte h não tá funcionando oque faço?
Como você está fazendo as ligações dela?
Já voltou a funcionar?
Como funciona para colocar o bluetooth hc 05? Quais códigos devo acrecentar? poderia me ajudar?
Olá Waller!
Acho que esse post pode te ajudar: https://www.makerhero.com/blog/tutorial-arduino-bluetooth-hc-05-mestre/
Olá!
Pode ser meio óbvio, mas eu queria saber como pode se ligar o Motor DC 3-6V e um Servo 9g enquanto o Arduino é alimentado por quatro pilhas de 1,5V?
Poderia me enviar um esquema, como no Fritzing?
Obrigado!
Bom dia, preciso de uma placa para adaptar em um brinquedo grande que funciona com uma fonte DC 5 volt 2 Amp. Que realize às seguintes funções, movimentar 2 motores de 2,5 volt cada um,no sentido horário e anti horário com controle de velocidade, se for possível me mande o preço e como comprar. Grato
É possível acionar uma mini bomba de água DC com essa ponte?
Sim, mas existem soluções melhores para seu projeto.
Olá , posso alimentar o arduino com os 5v da Ponte H?
Para o segundo circuito, a alimentação externa é que vai alimentar a ponte H e o arduino ou apenas a ponte H?
Oi boa noite, estou querendo alimentar 2 motores 5v, posso utilizar uma fonte externa e alimentar o arduinoe a placa?
Boa tarde. 25W é a potência máxima, ou por canal?
Olá. Gostaria muito de saber se há algum problema em usar uma fonte de 4.9v-5v para alimentar a entrada de 12v.
Posso liga o 5 vdc da ponte H ao 5 vdc do Arduíno?
Sim
Estou com o seguinte problema: o programa funciona, o motor (A)(12v) gira para um lado e para o outro mas a tensão entre OUT1 e OUT2 é de 3.5v (não deveria ser em torno de 12V?). estou usando uma bateria automotiva (13.5V) mantida em carga por um carregador de bateria. testei com 2 módulos e o resultado foi o mesmo.
Se tiro o jumper ATIVA 5V ou ATIVA MA, o motor não gira.
O que pode ser? módulos com defeito?
Olá, boa tarde!
Gostaria de saber como controlar a direção do meu motor de passo, se estou usando as duas saidas do driver em serie pra um unico motor! E a velocidade, devo usar os pinos da saida A ou B?
Obrigado!
Muito bom resolveu meu problema .
Boa noite galera
Tenho um projeto em uma FPGA altera Ciclone IV, entao, esse Driver Ponte H L298N e conpativel com essa FPGA. Prociso controlar dois motores de um carinho com senssores ultrasonicos HY – SRF05…
GRATO!!!
Olá consegui montar o comando para controle dos motores , está funcionando ok Gostaria de uma explicação, fazer um led dar duas piscadas antes de girar o motor 1 e depois o led2 repete o mesmo feito pro motor 2
onde e uasa e como e usada ??
Olá, montei uma ponte H com dois relé para usar em um carrinho. Porém, depois deum certo tempo o arduino trava e so volta a responder quando reseto. No código, para o motor ir para a frente usei o digitalWrite(frente, HIGH) e (traz, LOW); para ir pra traz usei a lógica inversa.Para o carro parado usei digitalWrite(frente,LOW) e digitalWrite(traz, LOW). Detalhe, quando montei o circuito na protoboard, funcionou corretamente. Quando coloquei os componentes em uma placa pcb, se colocar o carrinho p andar no chao,o arduino trava mais rapido, mas se o carrinho nao estiver andando, apenas fazendo o motor girar, o arduino demora um pouco mais p travar. Uso o arduino nano v3 e pilhas recarregaveis de 4300mA.
Olá boa tarde. para controlar um motor de passo, posso usar este mesmo exemplo, só trocar é claro os motores por um motor de passo, certo?
Não sei por que, mas o meu esta meio invertido, coloquei exatamente como esta as conexões, mas quando faço
IN1 HIGH
IN2 LOW
o motor A gira sentido anti-horario, até ai blz, mas se eu faço
IN1 LOW
IN2 HIGH
o motor B gira em sentido horario ‘-‘
o que pode ser?
Gostaria de saber como mandar 12v para os motores, no caso chega so 5v, preciso que chegue 12v.
Boa noite,
Como eu faço para conectar o receptor do rf com a placa de arduino e o placa h?
Com esse sistema.
Abraço
Vou ensinar ingreis., Pra esse povu anal fabetu: your mother
Sua main ôoooooooooooo. Tô falanu da main de ningueim
Axei muintu iteresante
Como faço para controlar 2 motores dc cada um controlado por 1 joystick? ?
Bom dia, estou iniciando arduino .. Preciso de parar/freiar 1 motor quando aciona sensor/chave … pode ser com ponte H? [email protected]
Boa Tarde
Eu tenho uma duvida, eu montei o cicuito igual esta na imagem para ligar um motor DC em um fonte de 12V, porem o motor esta muito fraco e devagar quando esta ligado no driver, mas ligado diretamente na fonte ele finciona na velocidade normal. Eu Nao tirei os jumpers MA e MB, portanto ele deveria esta na velocidade maxima. Voce sabe o que poderia esta causando esse problema?
Desde ja agradeço.
Gueber Souza
ALGUÉM SABE ONDE ESTA ELE OU SE PODERIA ME AJUDAR QUERIA INCLUIR DUAS PONTE H AO ENVÉS DE UMA PONTEH E UM SERVO NO LUGAR DO SERVO UMA OUTRA PONTE H E O PS2X
OLA AMIGO COMO FAÇO PARA INCLUIR MAIS UMA PONTE H E Ps2 A BIBLIOTECA JÁ TENHO OBG
oi este motor consigo abrir um persiana
Excepcional o trabalho de vocês !!! Parabéns pela dedicação e por compartilhar conosco os projetos.
gostaria de saber como posso utilizar a ponte H com arduino e modulo Rf para controlar os motores.
Estou fazendo um carro(robo) e preciso controlar as saidas que vão pra ponte pelo rf , como posso fazer isso?
Olá,
Comprei no ano passado com vocês um motor de passo Nema 17 e o Driver Motor Ponte H L298N para fazer o controle do mesmo. Estou montando uma máquina lançadora de bolas de tênis e o motor de passo é utilizado para girar o carrossel do alimentador das bolas. Estou tendo um problema um pouco estranho com essa solução, espero que vocês possam me ajudar:
Primeiro testei o motor de passo com alimentação externa independente (separada da alimentação do Arduino e demais motores) de 6V/1A, o motor de passo funciona normalmente, mas fica um pouco fraco. Buscando ter mais torque no motor de passo, tentei alimentá-lo com uma fonte de notebook, de 18.5V e 3,5A. Mas ele fica fazendo um barulho, engasgando, parando… dando giros curtos, enfim não funciona adequadamente. Não há mudança nenhuma nas conexões e cabos do Arduino, apenas troca-se a fonte. Também estou tentando o motor de passo sem carga, apenas observando o giro do eixo, fora da máquina.
Alguma idéia do que pode ser o problema? Desde já agradeço qualquer ajuda, pois a minha formação é Engenharia Mecânica 😉
(se quiserem posso enviar por e-mail a foto da montagem eletrônica e do código-fonte utilizado).
Att.,
Estou com esse problema também, estranho que no primeiro teste deu tudo certo, porém agora que finalmente imaginei que tivesse terminado meu projeto, o motor fica fraco num nível extremo. Comprei duas pontes, uma a mais, caso viesse a quebrar uma, troquei a ponte e continua do mesmo jeito.
Caso descubra, por favor coloque aqui a solução.
Farei o mesmo.
Olá Eduardo,
Pois e, o pessoal da MakerHero não nos respondeu ;-(. Eu andei procurando na internet e nesse link (https://tronixlabs.com.au/news/tutorial-l298n-dual-motor-controller-module-2a-and-arduino/) eles falam que deve-se retirar o jumper caso esteja alimentando o módulo L298N com uma voltagem de 12V ou superior. Mas quando eu retiro o jumper e alimento o módulo com uma fonte de notebook (18.5V e 3.5A), nada acontece. Então não sei mais o que fazer. Uma possibilidade, pelo que andei lendo, é que o motor de passo não aguente girar na velocidade que programei (myStepper.setSpeed(60)) com essa voltagem bem mais alta. Então vou fazer um teste com a velocidade bem baixa (com e sem o jumper na placa). Se vc decobrir algo me avise ok?
Então, cheguei a ver isto tambem, e realizei o mesmo teste.
Consegui resolver meu problema de um forma bem simples, coloquei o GND em comum tanto no arduino como na ponte H, no caso, a saída do jack negativa, pus junto no GND da fonte que estava utilizando.
Tenta aí e comenta se conseguiu.
Olá,
Tenho um carrinho de controle remoto básico, da Candide. Ele queibou o circuito e vou aproveitar para mexer com arduino, vou substituir o circuito pelo arduino. Essa placa é suficiente?
Tem algum exemplo de controle de velocidade com essa placa?
Valeu
Tenho duas duvidas. gostaria de saber se posso usar uma bateria externa de 3 volts, pq meu motores funcionam com 3 volts. A outra dúvida é quanto ao segundo diagrama de ligação, porque quando você utilizou a bateria externa você ligou o negativo da bateria no gnd do arduino? Obrigado.
Adilson, boa noite.
Tenho um projeto que utilizará 2 motores de 12V e 2 de 5V. É possível neste caso utilizar as duas configurações na mesma placa Arduino uma para cada placa ponte H L298N conforme o diagrama ?
Obrigado
Ramon
Bom dia Ramon,
É possível sim, pois as portas do Arduino serão utilizadas apenas para controle. A alimentação virá de uma fonte externa, certo?
Abraço!
Adilson – Equipe MakerHero
Olá Adilson, agradeço seu rápido retorno.
Vou utilizar duas fontes externas sim, 12 e 5V e tudo será controlado via Bluetooth com comando por celular.
Toda a mecânica está pronta e falta apenas esta etapa da automação.
Agora começam as dúvidas sobre interligações e programação.
Voltarei a pedir sua ajuda mais adiante.
Abraço
Ramon
adilson
fiz esta programacao. keria uma ajuda
#include
int static stepMotore = 100; //modifica step (passo) do motor
int B = A2; // porta analogica do botao
//un giro completo e’ composto da 360 gral,
//un numero di step pari ai suoi “stepMotore diviso 2”
int stepDaPercorrere = stepMotore/1;
//controle portas de acionamento motor ponte H L298N
int static IN1 = 11;
int static IN2 = 10;
int static IN3 = 9;
int static IN4 = 8;
Stepper mioMotore(stepMotore, IN1, IN2, IN3, IN4);
void setup() {
mioMotore.setSpeed(55); // velocidade
pinMode(B, INPUT);
}
void loop() {
int VB = digitalRead(B); // VB valor botão
if (VB == 1){
mioMotore.step(stepDaPercorrere);
delay(100);
mioMotore.step(-stepDaPercorrere);
delay(100);
mioMotore.step(stepDaPercorrere);
mioMotore.step(0);
} }
preciso fazer ele virar conforme este video ,mas minha cabeça ta cozinhando e nao consigo axar uma forma dele fazer da forma q esta no video.. o maximo q consigo e fazer ele ir e voltar e ir denovo . mas keria uma forma dele nao rodar quando ligar o arduino pois pretendo montar um prototipo de uma makina de cigarros ,mas ai toda vez q ligo o arduino ele ja começa rodando .
e com isso soltaria sempre um cigarro.
https://www.youtube.com/watch?v=r6CSaNl5s-8
poderiam me ajudar ?
Bom dia ! Gostaria de saber se é possivel controlar a posiçao dele ? Preciso coloca-lo em 3 posiçoes diferentes no carro da impressora. Um abraço e um bom dia !
Bom dia Equipe.
Estou montando um projeto de um “rover” em casa com três rodas, utilizando 3 drivers ponte h com ci l298n(MakerHero) e 6 motores DC GM25-370(china), ligando-os em pares, em cada ponte H. Utilizo normalmente as quatro entradas IN do driver para polarizar os motores, mas pretendo controlar a velocidade com PWM nas portas ENB.
Até aí tudo ok, porém eu já utilizei 10 portas PWM do atmega2560, só com servomotores, eu precisaria de mais 6 saidas PWM disponíveis para poder ligar essas pontes H, sendo que o arduino mega só possui 13 portas PWM. A duvida é a seguinte:
-Qual o consumo dos pins ENB com PWM?
-Eu poderia ligar UMA unica porta do arduino à DOIS ou MAIS pinos ENB? (Provavelmente não…)
-Se sim, há chance de eu queimar as portas do atmega, ou o driver?
Se precisar de foto do circuito que estou utilizando, posso disponibilizar facilmente. (Mas acredito que está tudo bem intuitivo.)
Seria de ótima ajuda se obtivesse resposta com vocês.
Após quatro anos do post, estou eu aqui…
Prezado Adilson
Obrigado pela explicação sobre a ponte H L298N. Gostaria de lhe fazer uma pergunta a mais, pois com seu conhecimento acredito que tenha um bom conselho.
Qual bomba peristáltica (motor) você indicaria para eu conseguir um fluxo contínuo de 1ml/min. Veja que os motores de passo do tipo NEMA não possuem a cabeça da bomba peristáltica, assim dificultando a implementação.
Tenho olhado esta bomba aqui: https://produto.mercadolivre.com.br/MLB-767756670-bomba-peristaltica-de-01ml-a-100mlminuto-pronta-entrega-_JM
Não sei se ela é suficientemente boa para permitir uma fluxo contínuo de 1ml/mim. Por favor, você tem algum conhecimento sobre este assunto.
Agradeço antecipadamente
Oi Adilson
Muito legal e explicativo.
Desculpe a ignorância, mas só uma pergunta…porque usar uma ponte L298N para aplicar PWM no motor se eu tenho PWN direto na placa arduino. Há alguma vantagem usando a ponte L298N? Qual?
Obrigado
Boa tarde Fernando,
Obrigado. Quando você usa uma ponte H, você pode controlar motores que exigem mais corrente. No caso dessa ponte, até 2A.
Abraço!
Adilson – Equipe MakerHero
Bom Dia!
Gostaria de usar 2 motores 2,3 ah cada para fazer um seguidor solar alguem poderia me ajudar com os codigos?
Tenho
1 PÇ – Placa Uno R3 + cabo USB
4 PÇ – Sensor de luz LDR
40 – jumpers macho-macho e macho-fêmea
1 – L298N
2 – motor 2,3 ah
Caros:
Fiz a montagem conforme a figura “motores DC 5V” e não funcionou. Pesquisando Google “l298n arduino module”, encontrei (por exemplo) o seguinte site :
https://www.instructables.com/id/Control-DC-and-stepper-motors-with-L298N-Dual-Moto/
Segundo esse site:
1) A alimentação deve ser colocada sempre nos pinos nomeados aqui de 6-35V e GND, mesmo que a tensão seja 5V.
2) É para manter o jumper 3 se a alimentação for menor que 12V.
Resumindo, mantive jumper 3 no lugar e alimentei os pinos 6-35V (+) e GND (-) e os motores funcionaram corretamente. Aparentemente, o pino 5V não pode ser utilizado como entrada.
Abs.
Estava tentando e não funcionava. Com sua dica funcionou. Obrigado!
Olá, não estou conseguido acionar a ponte h por um módulo bluetooth, sendo que já confirmei que o módulo está operando perfeitamente. Vc poderia dá uma sugestão?
is that fritzing? can get the L298n Part (.fzpz)?
Thanks before
Qual software voce utiliza para fazer essa prototipação?
tentei 123dCircuits mas nao achei esse drive
Posso usar esse drive como amplificador de potência das portas PWM do Arduino para ligar uma fita de LED RGB?
tenho um arduino uno r3
gostaria de saber como faço para configurar 2 sensores ultrassonicos hc-sr04,para quando eles detectarem objetos eles acionarem dois motores vibra call(separadamente)
seriam 2 sensores
que acionariam 2 motores vibra call
gostaria de ligar assim
sensor 1 liga motor 1
sensor 2 liga motor 2
gostaria se possivel da sua ajuda
e onde posso encontrar uma biblioteca com os codigos
Olá, obrigado pelo tutorial e pela paciência em responder-nos.
Eu estou tentando fazer um codigo, para uma bobinadora, e não consigo, ja olhei varios tutoriais e nada, peguei 3 codigos para tentar uni-los em 1 só, mas esta dando erro, Estou usando um motor DC, uma ponte H ( essa do tutorial ) e um sensor encoder, mais uma roda encoder de 33 pulsos.
Peguei 3 codigos, sendo um contador, e tentei fazer o motor para numa determinada contagem, e coloquei junto com esse codigo, um do controle da ponte H e um para exibir na porta serial.
Mas não funciona e dá erro, vejam abaixo, se alguém puder ajudar, agradeço.
CODIGO:
#include
#include
LiquidCrystal lcd(12,11,5,4,3,2);
int ENABLE=3; //PINO ENABLE
int IN1=8;
int pinosensor = 2; // sensor óptico encoder Porta A2 ao Arduino
int contador = 0; // Armazena o valor lido pelo sensor optico
int pino_botao_reset = A0; // Pino ligado ao botao de reset
int estadobotao = 0; // Armazena o estado do botao reset
boolean contador_anterior = 0;
boolean contador_actual = 0;
void setup()
{
pinMode(IN1,OUTPUT); //SETA OS 2 PINOS COMO SAIDA
pinMode(pinosensor, INPUT); // Define o pino do sensor optico como entrada
pinMode(pino_botao_reset, INPUT); // Define o pino do botao reset como entrada
pinMode(2,INPUT);
{
Serial.begin(9600);
Serial.println(contador);
}
lcd.begin(16,2);
lcd.print(“contador : 0″);
}
boolean debounce(boolean contador_anterior)
{
boolean contador_actual = digitalRead(2);
if contador_anterior != contador_actual)
{
delay(10);
contador_actual = digitalRead(2);
}
return contador_actual;
}
void loop()
{
int contador = digitalRead(2);
actual = debounce(anterior);
if ( anterior == 0 && actual == 1)
{
contador++;
delay (100);
Serial.println(contador);
}
contadoranterior = contadoractual;
}
estadobotao = digitalRead(pino_botao_reset); // Verifica se o botao reset foi pressionado
if (estadobotao != 1)
{
// Zera o contador
contador = 0;
// Apaga o valor anterior
lcd.setCursor(11,0);
lcd.print(” “);
// Mostra o valor zerado
lcd.setCursor(11,0);
lcd.print(contador);
}
// Le as informações do pino do sensor optico
contador = digitalRead(pinosensor);
// Verifica se o objeto foi detectado pelo sensor
if (contador > 1)
{
// Incrementa o valor do contador
contador = contador++;
// Apaga o valor anterior
lcd.setCursor(11,0);
lcd.print(” “);
// Mostra o valor do contador
lcd.setCursor(11,0);
lcd.print(contador);
}
int contador = analogRead(2);
Serial.println(contador);
// Loop caso o objeto pare sobre o sensor
//while(digitalRead(pinosensor) != 1)
// Le as informações do pino do sensor optico
leitura = digitalRead(pinosensor);
// Verifica se o objeto foi detectado pelo sensor
// Incrementa o valor do contador
contador = contador++;
while (contador <700)
{
if (contador < 700)
digitalWrite(IN1,HIGH); ROTACAO PARA FRENTE
else
digitalWrite(IN1, LOW);
delay(100);
}
ERROS
Build options changed, rebuilding all
sketch_oct12b_programa_atual.ino: In function 'boolean debounce(boolean)':
sketch_oct12b_programa_atual.ino:39:7: error: expected '(' before 'contador_anterior'
sketch_oct12b_programa_atual.ino: In function 'void loop()':
sketch_oct12b_programa_atual.ino:52:3: error: 'actual' was not declared in this scope
sketch_oct12b_programa_atual.ino:52:21: error: 'anterior' was not declared in this scope
sketch_oct12b_programa_atual.ino:63:5: error: 'contadoranterior' was not declared in this scope
sketch_oct12b_programa_atual.ino:63:24: error: 'contadoractual' was not declared in this scope
sketch_oct12b_programa_atual.ino: At global scope:
sketch_oct12b_programa_atual.ino:69:3: error: 'estadobotao' does not name a type
sketch_oct12b_programa_atual.ino:71:3: error: expected unqualified-id before 'if'
sketch_oct12b_programa_atual.ino:85:6: error: 'contador' does not name a type
sketch_oct12b_programa_atual.ino:89:3: error: expected unqualified-id before 'if'
sketch_oct12b_programa_atual.ino:101:10: error: redefinition of 'int contador'
sketch_oct12b_programa_atual.ino:10:5: error: 'int contador' previously defined here
sketch_oct12b_programa_atual.ino:102:6: error: 'Serial' does not name a type
sketch_oct12b_programa_atual.ino:109:3: error: 'leitura' does not name a type
sketch_oct12b_programa_atual.ino:113:5: error: 'contador' does not name a type
sketch_oct12b_programa_atual.ino:115:4: error: expected unqualified-id before 'while'
Boa noite, estou comprando este motor:
https://produto.mercadolivre.com.br/MLB-791697704-motor-eletrico-300w-bosch-moto-scooter-skate-_JM
Sabe me dizer se a ponte H com o Arduino é possível de controlar a velocidade deste motor pelo celular ? É para um trabalho da faculdade.
Uma dúvida: essa primeira configuração alimenta a ponte H diretamente com os 5v do arduino pra controlar os motores de 5v. isso não pode danificar o arduino????? A máxima corrente que ele pode fornecer é de 200mA. Ou a ponte H tem algum circuito interno que amplifica a corrente, ou outra coisa?
Obrigado.
Guilherme
Olá Adilson.
Estou fazendo um carrinho com dois motores, e estou com dificuldades para controlar ambos ao mesmo tempo. Por exemplo, com o seguinte código no loop, eles não rodam.
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(2000);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
delay(500);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(2000);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
delay(500);
Sabe como posso resolver este problema?
Obrigado,
Leonardo
Bom dia Adilson!
Comprei um chassi e 2 motores com uma Ponte H L298N para montar um robozinho, mas veio uma Ponte H L298D.
Estou um pouco confuso sobre como utiliza-la para controlar os motores do robô. Pode dar um help?
Preciso controlar os sentidos de direção e velocidade. Também não localizei na placa o jumper 5v.
Att.
Para complementar. Não sei se está correto eu dizer que é uma Ponte H L298D, pois esta escrito nela L298N, nas ela é diferente desta no tutorial do blog.
https://m.youtube.com/watch?v=l51jIGdxnzo
Olá, estou com uma duvida.
Quero controlar um motor de 5v porem vou usar uma bateria de 12v como alimentação externa pois queria evitar alimentar com o arduino. Se eu manter o jumper 5v e o jumper do PWM como esta na segunda figura meu motor recebera 5v ou 12v? Como posso enviar para o meu motor apenas 5v com uma alimentação externa de 12v?
Boa tarde Carlos,
O seu motor vai receber 12V. Se você precisar de 5V, utilize a saída do pino “5V” conforme mostrado no diagrama.
Abraço!
Adilson – Equipe MakerHero
OK! muito obrigado!
e para eu ligar apenas um motor dc com Arduíno e ponte h,posso seguir mesmo esquema?lembrando que eu estou usando as saídas analógicas do Arduíno como digitais,pois esgotei todas as digitais.
Boa tarde!
Primeiramente gostaria de agradecê-lo por compartilhar conhecimento com todos nós e também por auxiliar nas dúvidas.
Em segundo lugar gostaria de saber se é possível manter uma proteção caso haja travamento do motor. Apenas com o driver e o firmware é possível realizar a desenergização dos motores em uma situação dessas?
Obrigado desde já e desculpe qualquer imaturidade na pergunta, estou iniciando no meio da eletrônica.
Boa Tarde,
Gostaria de saber se tem como colocar algum sensor quando acionado uma vez ele faz o motor rodar no sentido horário em um determinado tempo, e quando acionado de novo ele faz a mesma coisa so que no sentido anti-horário. O mesmo esquema de portões elétricos, teria como? Sou péssimo em programação e preciso fazer isso para um trabalho da faculdade teria como me ajudar?
Prezado Adilson,
comprei o módulo, segui o procedimento de ligação dos dois exemplos. Preciso trabalhar com a primeira configuração, onde insiro uma tensão de 5v no módulo para alimentar os motores. A configuração não funciona.
Com a segunda configuração rodou tudo perfeito.
Alguma sugestão?
Amigo, não tem nenhum segredo ao lado do motor A tem um conector com 3 borner, o do meio é o GND, da esquerda +12v e da direita + 5v. Pode ligar da porta 5v e GND do Arduino que vai funcionar beleza.
Espero ter ajudado.
Olá, gostaria de controlar a velocidade de cada motor utilizando dois potenciômetros, um para cada motor. É possível?
Boa tarde! Felipe!!!
Gostaria de acrescentar no segundo código o sensor Ultrassônico e o modulo bluetooth HC 5, estou reaproveitando uma carcaça de um carrinho, e estou querendo adaptar….Conforme outros posts…é possível controlar via celular através do Bluetooth, e deixá-lo autônomo, poderia me ajudar?
tem sim como fazer um carrinho controlado por celular com o aplicativo eu ja fiz
Amigo, muito bom!! Poderia me tirar uma dúvida? Gostaria de usar 2 Canais do modulo Shield Motor para controlar um motor DC poderia me dizer como posso fazer isso?? Obrigado.
Parabéns ADILSON THOMSEN, pela paciência em responder a tantos, é difícil achar pessoas assim.
Boa tarde Eduardo,
Obrigado, nem sempre conseguimos responder à todos, pela quantidade de mensagens e dúvidas, mas fazemos o possível. 🙂
Abraço!
Adilson – Equipe MakerHero
Ola, boa tarde
Estou a iniciar um projeto em que tenho que controlar 2 motores de passo (c2164 60045 + a1845206), mas estou com doficuldades em escolher o melhor modulo para os controlar.
E possivel dar uma ajuda?
Obrigado
Olá.
Comprei essa shield e seu site me ajudou bastante na hora da programação.
Acabei criando uma biblioteca que basta jogar o movimento desejado (p frente, p trás, p direita, p esquerda) e o valor PWM.
Caso queira disponibilizar aqui, me envia um e-mail que passo o arquivo!
[email protected]
abs e obg!
Opa amigo se pudesse eu gostaria de receber, tem como mandar para o meu email? [email protected]
Olá, Mirella.
Poderia me enviar este arquivo?
Segue meu email: [email protected]
Agradeço desde já,
Thayná Almeida
AInda tem a biblioteca com vc??
poderia me mandar?
[email protected]
Fiz as conexões, entretanto as velocidades dos dois motores (os motores são idênticos e de 6V – aqueles com caixa de redução amarela) são diferentes e o robô de move sempre em curva (no caso para a direita). Qual o possível problema? Pode me ajudar, por favor?
Boa tarde, mesmo com o fato dos motores serem identicos, eles acabam possuindo caracteristicas diferentes, ou seja, mesmo mandando o mesmo valor pwm um pode ir mais rápido do que o outro. Sugiro que voce use um encoder ou tente no teste achar a velocidade para cada um
Adilson, como fica a ligação para um motor de 12V com 3A? Desde já, agradeço.
Olá, comprei uma ponte h e tentei testar não consegui, pois tenho apenas um motor, queria mandar comandos para ele virar anti-horário e horário, mas não consegui, o motor que tenho é 12V. Será que você poderia me ajudar?
Pessoal estou automatizando uma janela e quero que 1 botão feche a janela e o outro abra, escrevi o código da seguinte forma (segue abaixo), porem o quando o push button é pressionado motor não gira, o led acende.
//Definicoes pinos Arduino ligados a entrada da Ponte H
int IN1 = 4;
int IN2 = 5;
const int led = 13; //constante led refere-se ao pino digital 13.
const int botao = 2; //constante botão refere-se ao pino digital 2.
const int botao_1 = 3; //constante botão refere-se ao pino digital 3.
//Variável que conterá os estados do botão (0 LOW, 1 HIGH).
int estadoBotao = 0;
int estadoBotao_1 = 0;
void setup(){
//Define os pinos como saida
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(led,OUTPUT); //Definindo pino digital 13 como de saída.
//Define os pinos como entrada
pinMode(botao,INPUT); //Definindo pino digital 2 como de entrada.
pinMode(botao_1,INPUT);//Definindo pino digital 3 como de entrada.
}
void loop(){
//Lendo o estado do pino , constante botao, e atribuindo
//o resultado a variável estadoBotao.
estadoBotao = digitalRead(botao);
estadoBotao_1 = digitalRead(botao_1);
//Gira o Motor A no sentido horario
if (estadoBotao == HIGH){
digitalWrite(led,HIGH); //Botão pressionado, acende o led.
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}
else{
digitalWrite(led,LOW); //Botão não pressionado, apaga o led.
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
}
//Gira o Motor A no sentido anti-horario
if (estadoBotao_1 == HIGH){
digitalWrite(led,HIGH); //Botão pressionado, acende o led.
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
}
else{
//Para o motor A
digitalWrite(led,LOW); //Botão não pressionado, apaga o led.
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
}
}
Mas os motores funcionam quando não têm os IF’s?
Ao meu ver, a programação não tem erro.
Se com uma programação teste, não funcionar, também, verifique as ligações e a alimentação. A alimentação tem que ser no mínimo, 6V e 200mah para cada motor.
Ola,
Montei esse mesmo esquema com o Arduíno, ponte H e 2 motores de vidro elétrico de 12v usando uma fonte externa de 12v também mas quando vou testar, a saída da ponte H para os motores só sai 4,8v. Teria algum sugestão para resolver isso ?
abraços
Retire o jumper
Sem o jumper, não passa energia.
Estava com defeito, por isso não funcionou.. troquei por uma ponte H nova e deu certo.
Boa noite, então, fui testar aqui minha ponte H e algo curioso aconteceu. Quando liguei ela (usando alimentação do Arduino) sem o jumper Ativa 5V ela ligou, mas não funcionou. Porém quando liguei o jumper ela começou a funcionar. Sabe me dizer o que aconteceu ?
Você tem que usar alimentação externa.
O arduino não tem capacidade para alimentar um motor.
Tem grande risco de queimar o arduino.
Amigo, eu estou com a ponte H que comprei com vocês e ela funcionou aqui, só que diferente de outra que tive, esta não sei como controlar a velocidade do motor. Como faço isto?
Outra coisa percebi que este modelo liga o GND da alimentação que recebe da bateria, no Arduino tmb, se não a roda fica lenta. Isto tem risco de danificar a ponte H?
Para controlar a velocidade, você terá de usar “analogWrite”, em vez de digitalWrite.
Mas primeiro, tem que ligar todos os pinos (IN1, IN2, IN3, IN4) em portas PWM do arduino.
Depois você faz essa substituição que falei antes e coloca um número de 0 a 255, em vez de HIGH.
Ex: analogWrite(IN1, 150);
Sobre o GND: Acreito que não danifique, mas tem que ser ligada, sempre. Não importa o que seja, se estiver sendo controlado por um arduino, tem que ligar no GND do arduino, também
Olá,Bom dia!
Gostaria de saber se a alimentação externa da ponte H poderia ser menos de 12v
Aguardo resposta, Agradeço desde já a equipe MakerHero!
Sim pode mas não pode ser abaixo de 5 v eu acho
Olá, estou alimentando minha ponte H com 13.5V, teria alguma forma de puxar energia dela para alimentar diretamente o arduino? Ou só fazendo uma derivação mesmo, no cabo que esta vindo 13.5v e colocando um regulador de tensão?
O Arduino já tem um regulador de tensão, portanto você pode utilizar 13,5 V para alimentá-lo, porém atente-se que deve ligar a alimentação ao pino Vin para não ter problemas.
ola turma, quem poderia me dar um help, preciso montar com o arduino uma controle de inversao de motor DC e sua velocidade, igual neste projeto mas porem com final de curso para ambos os lados e um potenciometro de velocidade , por exemplo, eu clico num botao X ele gira para a Direita e quando acionar um botao P ele para e se novamente precionar o botao X ele gira para a Esquerda ate ser acionado novamente o botao P onde o P seria o botao de Final de Curso . caso tenha alguem que possa me dar essa ajuda ficaria grato, se for o caso de fazer um preço bom eu posso pagar tambem.
Apertei enter sem querer. rsrsrs
Você tem que usar a função “IF”.
Da uma pesquisada sobre isso.
boa tarde
consigo usar essa ponte J num Arduino Pro Mini Atmega328p ?
nesse mesmo arduino com a placa h posso colocar um shield de bluetooth ou wifi para fazer um mini controle remoto?
Sim, pode.
Mas use alimentação externa para a ponte H, principalmente.
O shield bluetooth ou módulo wifi, pode ser alimentado pelo arduino,só se for usar um ou outro, se for usar os dois, é bom usar alimentação externa para um dos dois, para não sobrecarregar o arduino.
Parabéns pelo post. Muito bem explicado. Onde conseguiu essa imagem legal da ponte H no fritzing? Você teria o link para download?
Quando executo o programa no arduino aparece esssa mensagem stray’302′ in program
Alguem pode me ajudar urgente
É possível utilizar um nema 23 10 kgf com esse driver?
Olá, queria fazer uma placa controladora para uma porta automática, pelo que vi é quase o que eu preciso mas com algumas adaptações.
Preciso que calcule o percurso da porta, e se ela estiver fechada faça abrir, se estiver aberta faça fechar.
Será que pode me ajudar nesse projeto?
Como faço pra comprar esses equipamentos e começar a incrementa-lo?
Obrigado!
Por que o GND do arduino e ligado na bateria?
É necessário pela necessidade de ter o “terra” para servir de referencial entre os IN1 até o IN4 do seu L298N e o arduino.
Sabendo que o GND será “0V”, quando vc colocar 5V , usando o comando digitalWrite(IN1, HIGH), você estará colocando os 5V em relação ao terra da bateria e também que é o mesmo terra da fonte.
Outra coisa que notei no codigo, que existem algumas placas com L298N que tem dois pinos ENA (enable A) e ENB (enable B), neste caso para ao logica do codigo acima funcionar, terá que deixar o/os pino/os em nivel alto, pois enable quer dizer habilitar motor A ou B.
Espero que tenho ajudado 🙂
Estou montando um seguidor de linha com 02 sensores infravermelho. Tenho 04 motores DC (3-6v cada) e a ponte L298N. Posso ligar 02 motores de um lado em série no OUT1(fios positivos) e OUT2(fios negativos) e do outro lado 02 motores em série OUT4(positivos) e OUT3(negativos) ?
Sim.
Você só tem que se preocupar com a tensão e com a corrente.
Nesse caso, qual bateria é recomendável?
Devo adicionar algum outro componente para que o meu seguidor de linha faça as curvas na velocidade adequada?
O ideal é usar uma bateria de lipo, mas vai sair um pouco caro, então seria melhor se você usa-se apenas 2 motores, pois com 2 motores, uma bateria 9V já é o bastante.
A velocidade você pode controlar com a ponte H, não precisa de outro componente.
Luna
Manda pra gente o camando usado no seu seguidor, assim podemos aprender com os projeto dos outros.
Grande abraço!!!
Léo
Boa noite!
VOu fazer um carrinho na faculdade e vou controlar pela Ponte dois motores dc 12v. Gostaria de saber qual a alimentação correta para ele, só tenho baterias 9v, gostaria de saber se posso unir três baterias 9v, mandando pra ele 27v. Se a própria ponte faz a divisão das tensões para cada motor.
Grata
https://forum.clubedohardware.com.br/topic/1122255-alimenta%C3%A7%C3%A3o-para-motor-de-corrente-continua-de-12v/
minha vó!
Boa tarde,
Consigo utilizar essa ponte H com outros microcontroladores ?
Podem me recomendar algum motor com um torque e rpm alto ?
Abracos
1º Sim, você consegue. É só fazer a ligação correta.
2º Essas duas qualidades são meio controversas, pois para ter maior velocidade, perdesse torque e para ter maior torque, perdesse velocidade.
Para que você pretende usar esses motores?
Boa noite!!
Pretendo montar um mini barco e estou precisando usar um motor que consiga um bom desempenho dentro d’água. Portando preciso de um torque forte com um rpm razoável.
Obrigado pelo apoio.
Bom, eu te aconselho a pesquisar sobre motores a prova d’água, dependendo de como você vai colocar os motores.
Boa tarde,
Fiz uma ligação com uma fonte externa bateria de 9V e 2 motores. Tudo esta funcionando perfeitamente, porem a velocidade do motor B quando baixo de 100 ele para de funcionar, enquanto o motor a esta ok até velocidade 0.
Se alguém conseguir me ajudar agradeço.
Bom dia Fabricio,
Por favor tente utilizar outro tipo de bateria, ou até mesmo uma fonte externa para testes, para verificar se o problema é na alimentação do shield.
Abraço.
Adilson – Equipe MakerHero
Bom dia Adilson.
Obrigado pelo retorno. Seria uma fonte destas https://www.makerhero.com/pd-2d5c9b-fonte-dc-chaveada-5v-2a-plug-p4.html?ct=&p=1&s=1? Já tentei com a alimentação do cabo usb do próprio uno e com uma bateria de 9v externa. Medindo com o multimetro ele simplismente corta a alimentação do segundo motor quando a velocidade é setada em 100.
A tensão dessa fonte é baixa, use uma fonte de 9V ou mais.
Mas acredito que o problema esteja na ponte H.
Te aconselho a entrar em contato com o vendedor, sobre o problema.
Qual a tensão, a corrente e/ou potencia de trabalho do motor?
Olá Adilson, vez em quando visito seu blog, gostei desse comentário sobre Arduino principalmente sobre Ponte H L298N: tenho um Arduino e encomendei 5 placa dessa ponte , tá pra chegar, sou meio inexperiente ainda em Arduino, mas to aprendendo, valeu as dicas, Att.. Ecio
Valeu Ecio!
Abraço
Adilson – Equipe MakerHero
Estou fazendo um braço robótico usando um motor DC de 12V no corpo e um servo na junta superior. Estou usando o Arduino + motoshield para acionamento dos motores, gostaria de saber se o motor DC que ficará na parte de baixo do braço trava o eixo para que ele sustente o restante do braço? obrigado
Para montar um braço robótico é indicado o uso apenas de servos-motores. Nunca vi com motores DC.
O servo tem muito mais torque e é mais fácil para comandar os movimentos.
Como Roney L disse, é dificil alguem querer fazer braco robotico com motor tradicional. Ja o servo motor é um motor com caixa de reducao e tambem um controlador de posicao.
Se voce quiser fazer um braco robotico com motor tradicional DC, tera que ter tambem um caixa de reducao para motores e tambem um encoder para saber a posicao onde esta o braco… e tudo isto já tem dentro do servo motor. Boa sorte se quiser sevir utilizando motores simples em vez de servor motor.
Já ia esquecendo, como este modulo, já para controlar tambem motor de passo 🙂
Porem apenas um motor de passo por modulo 🙁
Boa noite, consigo controlar dois motores de vidro elétrico com essa placa?
Olá Boa Noite
Esse drive alimenta um motor de passo, neste caso a corrente será de 4A?, como faço essa ligação ? (basta jampear as saidas),
Roberto Alves
Acho que tem uma informação errada nesse post. Diz que para controlar por PWM tem que tirar o jumper ao lado dos pinos de comando dos motores mas não é verdade aqueles pinos são para ativar o motor A e motor B, eu controlo por PWM mesmo com aqueles pinos.
Boa tarde Lincon,
É provável, esse post é um “pouco” antigo, logo alguma coisa pode ter mudado na construção da placa. Vamos revisar.
Abraço e obrigado!
Adilson – Equipe MakerHero
Boa tarde, estou controlando dois motores de vidro elétrico de 12v com essa ponte h, eles funcionam direitinho, porém depois de um certo intervalo de tempo o dissipador da ponte h esquenta, vc saberia me dizer qual seria o problema?
Bom dia Lucas,
É normal o dissipador esquentar, mas se ele está esquentando além do normal, pode ser algum problema de sobrecarga no módulo.
Abraço.
Adilson – Equipe MakerHero
Mano, show seu artigo. Comprei esta shield e aqui obtive todas as informações de forma simples e concisa. Utilizei seu sketch para testar o funcionamento e deu certo de primeira. Parabéns
Valeu Danilo! Abraço.
Adilson – Equipe MakerHero
Olá, estou fazendo um projeto para controlar dois servos motor MG995 e um motor DC mitsumi M28nN-1 R-14 7414,
onde os servos irão fazer um movimento independente, onde os dois servos iniciarão na posicção 90 Graus, e depois o servo1 movimentara um braço de uma posição de 90 Graus a 140 Graus com movimento lento, e manter parado por 25 segundos e depois mudar para posição 80 Graus e manter parado por 25 segundos, e o servo2 quando o servo1 for para a posição 140 Graus o servo2 manterá na posição de 90 Graus aguardar 5 segundos e ir para o posição 80 Graus com movimento lento, e quando o servo1 for para a posição 80 Graus o servo2 manterá na posição 80 Graus aguardará 5 segundos e ir pra posição 110 Graus e depois fazer novamente os movimentos e parar e o motor DC movimentará uma base no sentido horário por 25 segundos movimento lento, e depois movimentar no sentido ant-horário por 25 segundos e depois parar, podes me ajudar com esse código, pois estou fazendo um braço robótico e queria fazer esses movimentos, se quiser ver a mecânica para entender melhor os movimentos posso enviar fotos por email ou whatsapp, se for possível fazer o circuito para o acionamento dos motores e quais componentes irei precisar para esse circuito, preciso muito urgente, desde já agradeço sua atenção, obrigado.
Camarada na primeira ligacao para funcionar corretamente o fio vermelho que sai dos 5v do arduino tem que ir na entrada de 12v e o jumper de 12v deve ficar no lugar , ai sim ambos motores irao funcionar alternadamente ok !!
Muito bacana este projeto, parabéns!
Poderia me ajudar a esclarecer uma dúvida:
Para controlar 2 motores de 24V 250W é necessário utilizar uma ponte H.
Estava vendo alguns projetos pelo youtube que utilizam a placa Sabertooth 2×25.
O problema é que esta placa é muito cara.
Você teria ideia de uma outra ponte h mais barata para controlar estes 2 motores ou, é possível utilizar uma ponte H para cada motor?
Desde já agradeço.
É possível, sim, utilizar uma ponte H para cada motor.
Você só terá mais trabalho.
Ola,
Estou fazendo um projeto para acionar 2 motores por pushbuttons (dois para cada motor,um para cada sentido). No entanto os motores ficam bem fracos em um dos sentidos. Como posso resolver ?
CARLOS VOCÊ CONSEGUIU ACIONAR OS MOTORES COM PUSHBUTTONS ? É QUE ESTOU FAZENDO UM TRABALHO PARA ACIONAR COM PUSHBUTTON E NÃO ESTOU CONSEGUINDO FAZER A FUUNCIONAR… TEM COMO VOCÊ ME ENVIAR A PROGRAMAÇÃO?
Estou com uma duvida no texto…
“(6-35v) e (GND) – Aqui será conectado a fonte de alimentação externa quando o driver estiver controlando um motor que opere entre 6-35v. Por exemplo se estiver usando um motor DC 12v, basta conectar a fonte externa de 12v neste pino e (GND).”
Se eu colocar um motor que tem essas especificações ..
– Tensão Nominal: 12,00 V;
– Tensão Operacional: 6V ~ 18V;
Eu posso colocar uma fonte externa de 14,8V ?
Sim!
Estando dentro do mínimo e do máximo, não tem problema.
bom felipe, fiz um protótipo do carrinho com a placa arduino controlado pelo celular,funcional legal,mais depois de 2 dias os motores MA e MB parou de funcionar, por onde veio no kit que do protótipo,dai eu desmontei um carrinho de controle remoto onde tinha os mesmos motores, tendo um motor para as rodas da frente e outro motor para as rodas de traz,obviamente o motor das rodas de traz tem mas tração que as da frente,e no motor de traz tinha 2 capacitores de 104 e 103 e no da frente tinha apenas um de 104,o carrinho funcionou mais o motor com os dois capacitores quando aciono o comando vive travando uma hora pega e outra não,funcionando apenas o moto de baixa tração quase parando,deixei os capacitores pois com o tempo o motor pode queimar,já troquei 3 vezes o mesmo motor mais continua com o mesmo problema,sendo que os motores funcionam normalmente ligados direto..
oque vc acha que pode ser e como posso solucionar este problema?
boa noite testei esse programa porem o motor não para
Olá
Comprei essa placa com a FlipeFlop
O tutorial parece muito confuso
Estou usando um motor 4.5V conectado a ponte e a ponte esta sendo alimentada pelo arduino e SEM o jumper
(arduino 5v +5v Ponte // Arduino GND GND ponte)
O motor simplesmente nao funciona, eu copiei o codigo e joguei no arduino e refiz as ligaçoes umas 3 vezes e o motor nao liga
Apenas foi possivel ligar o motor DEIXANDO o jumper CONECTADO, o que parece ser errado de acordo com o tutorial, logo parei de testar pois o mesmo diz que pode danificar a placa
O que estou fazendo de errado? O tutorial está correto? obrigado
Bom dia Felipe,
O post foi feito de acordo com os testes, e os circuitos foram esses mesmos… Você já tentou trocar de motor para ver se o problema não é algum tipo de sobrecarga ? Como estão os jumpers em Ativa MA e Ativa MB ?
Abraço.
Adilson – Equipe MakerHero
Alimentar a ponte H pela entrada +12v,e pela saída de 5V da ponte H alimentar o arduino pela entrada de 5V ,
não retirei o jumper e o código da felipeflop funcionou perfeitamente,para acionar 2 motores que roda para no mesmo sentido ,no caso do carrinho é preciso inverter o sinal,usar um porta inversora CI 74HCT04N ,alimentar o CI sòmente com 5V,não conectar o GND,digital 13 vai na entrada da porta e a saida da porta vai na IN4,digital12vai na entrada e a saida vai na IN2,digital 8 vai na INA e digital11 vai na INB,para que os 2 motores girem p/ frente é preciso modificar o codigo.
Felipe, estou com o mesmo problema. Comprei o kit chassi 2wd + ponte H novo, logo está funcionando. Fiz a 1ª ligação (sem o jumper) alimentando direto pelo arduino, colei a programação no sketch e nada aconteceu. O que estou fazendo de errado, alguém pode me ajudar?
Boa tarde Elisa,
Você testou os motores de forma independente, para saber se realmente estão funcionando ?
Abraço
Adilson – Equipe MakerHero
Ola pessoal alguém pode me ajuda estou fazendo um kit para abrir e fecha porta de van o problema esta na caixa de redução tenho um motor de 2800 RPM e para ter mais torque tenho que reduzi para 180 a 200 RPM existe uma caixa de redução pronta o terei que fazer e como faço
moro RS
Boa tarde,
fui testar meu L298N com o código que vcs postaram, mas não funcionou. coloco multímetro e vejo a tensão que sai do Arduíno está variando, mas na saída do L298N nas duas saídas sempre fica em zero. alguém sabe me dizer se meu L298N queimou??
Boa noite,
Funciona com PIC 4520?
Abraço!
Estou com um projeto bem simples, mas estou tendo um problema que não consigo resolver, já estou quase achando que o problema é na ponte..
Tenho que acionar 02 motores em um sentido por 2 segundos, paro por 2 segundos e inverto a direção por mais 2 segundos.
Enfim, quando faço a ligação os motores não seguem essa lógica. Mas se eu desligo o motor A (mantendo a ligação lógica com o arduino para comando dos dois motores) o motor B obedece corretamente a lógica. Desligando o motor B, o motor A também obedece a lógica correta. Concluindo que a programação está correta.
Resumindo, desligando apenas 1 motor da ponte, o outro motor funciona na lógica correta, mas ao ligar os 2 motores na ponte a lógica fica louca.
Alguém tem alguma sugestão?? Seria a ponte com defeito ??
Talvez seja a alimentação. Você está alimentando externamente ou com o VCC do arduino?
Eu estou com o mesmo problema ,usando a ponte H,gostaria que 2 motores juntos girassem no mesmo sentido e depois em outro sentido,alguém poderia me enviar o código,é possivel isso.
Olá! pessoal fiz uma library para trabalhar com essa Ponte H, confira em: https://clubedosgeeks.com.br/programacao/arduino/library-driver-motor-ponte-h-l298n-arduino
Que excelente!
Obrigado pela contribuição!
Abraço!
Olá, possuo um controlador de motores igual a esse e gostaria de saber se a função de freio realmente funciona, porque quando coloco high em ambos os pinos digitais ele para apenas após continuar rodando um tempo devido à inércia. Por este motivo tive que usar um encoder de quadratura para parar o motor. Gostaria de saber se o freio (high em ambos os pinos) realmente trava o motor.
Boa tarde Rafael,
Encontrei um post falando sobre isso. Tente a seguinte sequencia: ENA em LOW, IN1 em LOW e IN2 em LOW, casa você esteja usando o motor A, ou ENB em LOW, IN3 em LOW e IN4 em LOW caso você esteja usando o motor B. Isso deve parar instantaneamente o motor.
Abraço
Adilson – Equipe MakerHero
Posso ligar o mesmo motor nas duas saídas? Preciso de mais corrente para o mesmo.
Oi, bem a primeira opção é para motores DC de capacidade 5 V, certo? E a segunda é para motores DC de capacidade 12 V, correto? Pois bem, meus motores são de capacidade 7,5 V, posso usar o 2º circuito, mas com uma bateria de 7,5 V? Pois bem, ligando o motor direto a bateria funciona, mas usando o 1º circuito um dos motores funciona rápido e o segundo quase nem funciona isso pq eu coloquei o JUMPER se eu não colocasse ele taria parado. Qual seria a solução de meu problema?
Boa noite,
Sou iniciante em Arduino e recentemente adquiri vários produtos de vocês.
Estou montando um projeto de TCC utilizando o sensor de chuva para abertura e fechamento de janela com monitoramento via internet.
Preciso utilizar 2 chaves fim de curso para desligamento dos motores tanto na abertura quando no fechamento da janela. Vocês possuem algum exemplo que eu possa montar? Vou utilizar o Driver Motor Ponte H L298N no projeto também.
Muito obrigado.
Cristiano.
Boa noite Cristiano,
No momento não temos exemplos com chave de fim de curso.
Abraço.
Adilson – Equipe MakerHero
Boa tarde, alguem sabe me dizer se consigo controlar 4 servo-motores com essa l298? É um trabalho de faculdade, Uns me dizem q posso controlar os quatro e outros dizem q é só dois mesmo. Help help
Olá Juliana, para controlar servo-motores vc não precisa dessa placa. Pode ligar eles direto no Arduino conectando cada servo numa saida PWM do seu arduino e mais a alimentação de 5V. É aconselhável vc fazer uma pequena fonte externa para os servos.
Essa ponte H é para 2 motores DC ou um motor de passo.
Bom Dia,
Gostaria se saber se é possível acionar os dois motores DC de 6V no mesmo sentido simultaneamente.
Pode Sim Fernando!
Boa noite.
Recentemente vim aqui perguntar sobre o controle de velocidade dos motores. Devidamente respondido e já funcionando!
Agora gostaria de saber outra coisa..
Minha ponte está ligada fisicamente à 2 baterias unidas e o controle de ligar e desligar é feito por 2 jumpers, será que consigo utilizar de um botão push button para ligar e desligar a ponte H? Sou novata e ainda não sei se há algum jeito de interromper a passagem de energia para a ponte 😡
Obrigada desde já.
Fui utilizar a mesma Ponte H na Raspberry Pi juntamente com o Pi4J e somente consegui controlar os motores após alimentar a entrada de 6-35v com os 5v da Raspberry Pi e conctar a entrada de 5v na de 6-35v. Somente assim foi possível utilizar os motores e controlá-los.
Caso alimentasse somentena entrada de 5v os motores não apresentavam resposta. Acredito que a adição dessa informação no artigo pode ajudar mais pessoas.
Att,
Arthur Silva
Boa tarde, adorei o tutorial, tenho um modulo desse que serviu para meu projeto de conclusão de curso, e posso garantir que é um ótimo produto. Porém estou a um bom tempo procurando na neto essa biblioteca que vocês usaram no fritzing e não estou encontrando, será que podem me enviar por email? Ficarei muito feliz se puderem me ajudar.
Ótima matéria, me esclareceu basante a cerca desse modelo, normalmente os encontrados são diferentes deste.
Mas ainda tenho uma dúvida, eu consigo controlar a velocidade do giro do motor?
Espero resposta. Abraços.
Consegue sim. Através dos comandos PWM você controla a velocidade que o motor gira.
Sim Rubia, vc consegue controlar a velocidade dos motores ligando os pinos ENA do modulo a pinos PWM do arduino.
Olá. No datasheet do L298 a tensão de trabalho pode ir a 46V mas na ponte a tensão vai até 35 V. Meu projeto tipo segway usa motores de 36 V com três baterias em série. Posso usar essa ponte considerando ainda que a tensão real da bateria é superior à 13 Volts o que em série chega perto dos 40 volts?
Acredito que não, pois os capacitores do modulo são de 35 volts, ao ser alimentado com mais de 35v, serão danificados.
Amigo, estou procurando o part para a ponte H L298N para o fritzing e não consigo encontrar nenhum que funcione. Você poderia falar aonde encontrou o que usou para fazer esses esquemáticos?
Bom dia
Estou a montar algo parecido e preciso de fazer esquemas como esses aí desenhados, qual foi o programa que utilizaram?
Obrigado
Ricardo
Boa tarde Ricardo
Não sei se foi nesse programa, mas eu uso o Fritzing para fazer esses desenhos.
Felipe
Bom dia estou utilizando a placa para controlar 2 motoredutores de 6 V, mas estou tendo bastante dificuldade para controlar a velocidade em baixa rotação, acredito que devido a restrição mecânica gerada pelo redutor.
Vcs já encontraram esse problema?
Tem alguma sugestão??
Parabéns pelo site.
Grato
O redutor que estou usando é o mesmo anunciado no site de vcs
https://www.makerhero.com/pd-11d0db-motor-dc-3-6v-com-caixa-de-reducao-e-eixo-duplo.html?ct=41d95&p=1&s=1
Amigo, eu imagino que se você tenta colocar a velocidade muito baixa pelo PWM não vai passar tensão suficiente pros motores funcionarem. Te aconselho colocar esse comando que não está funcionando e quando os motores pararem fazer a medição da tensão com um multímetro nos bornes de saída dos motores e ver se está passando algo abaixo de 3V ou muito próximo, já que 3v é a tensão mínima de funcionamento deles.
Qual a diferença da ponte L298N para a L298P ? Uq isso afeta em meu projeto ?
Desde já, Obrigado
Boa noite gostaria de saber se vocês não tem um programa deste acionamento mais com o pic 16F628A, obrigado
Boa tarde Jamir,
Infelizmente não temos exemplos com o PIC.
Abraço.
Adilson – Equipe MakerHero
Boa noite Adilson.
Obrigado pela atenção
abraço
att.
Jamir
Seria possível me passar um esquema deste com uma chave fim de curso com haste,,
por favor…
como eu faço para controlar a velocidade?
Boa noite Roney,
Utilize os pinos PWM, ligando aos pinos Ativa MA e Ativa MB.
Adilson – Equipe MakerHero
Olá! Estou tentando controlar 4 motores DC (dois estão ligados no MOTOR-A juntamente e os outros dois no MOTOR-B da mesma forma.) para fazer um robô andar. Utilizei o código de vocês e adaptei para quando receber um dado, os motores se acionam.
if (dado == 49){
//FRENTE;
delay(100);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
if (dado == 50){
//TRÁS
delay(100);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}…
Porém, quando envio o dado 49, apenas o MOTOR-B é acionado (os dois em conjunto) e quando envio 50, apenas o MOTOR-A. Utilizei o primeiro esquema de vocês. Isto acontece porque o circuito precisa de mais tensão? Se eu conectar uma fonte externa, além dos 5v do arduino, ele irá funcionar?
Boa noite Vitor,
Tente utilizar uma fonte externa, por favor.
Adilson – Equipe MakerHero
Adilson, usei uma fonte externa 5V nos motores e eles ficaram excelentes. Eu posso usar uma fonte de 5v no Arduino para alimentar ele e os sensores e outra na Ponte-H? Ou isso pode danificar as placas?
Obrigado!!
Boa tarde pessoal,
comprei o drive de ponte h. Fiz o ligamento do driver conforme o primeiro exemplo(usando como fonte de energia a saida da placa de arduino). Porém o meu nao funciona, ja verifiquei o exemplo e fonte e nao consegui ter sucesso.
ja fiz os seguintes teste(sempre usando a fonte de energia a placa de arduino ):
– com jumper ˜enable 5v˜: fiz a medicao com multimetro nos output A e B e constatei que com o jumper enable 5v nao é passada corrente para as saida output.
– sem o jumper ˜enable 5v˜: fiz a medicao com multimetro nos output A e B e constaei que passa corrente de 3.7V +-.
obs: na especificacao do motor dc que utilizo fala q ele é de 3 – 6 V.
alguem pode me ajudar com uma direcao a seguir?
Oi Daiton, estou com o mesmo problema, você conseguiu solucionar? Comprei a ponte H e um motor de 3 a 6V com caixa redutora, ambos do MakerHero, fazendo essas conexões, com essa código, e não funciona :/
Montei um sistema desse com um motor 12V,só tá faltando para-lo sempre no mesmo ponto , com uma chave fim de curso talvez ,mas não sei como montar esta chave no arduino ,teria como me ajudar?
Boa noite Lincoln,
Que tipo de chave você está pensando em usar ? Temos sensores ópticos reflexivos, que talvez sirvam para o seu projeto :
https://www.makerhero.com/pd-6b912-sensor-optico-reflexivo-x2-unidades-tcrt5000.html
Abraço.
Adilson – Equipe MakerHero
Estava pensando em uma chave fim de curso rolete …
Aqui na ninha ponte h o primeiro exemplo só funcionou com o jumper no ativa 5v. Eu usei o proprio arduino como fonte de alimentação. E não usei o vcc pois tava usando o 5v do arduino. Queria saber se alguem tem algun exemplo de como usar um modulo bt com essa ponte para controlar motores dc.
Obrigado, me ajudou bastante.
Juan González
Guadalajara (España)
Obrigado Juan !
Saludos !
Adilson – Equipe MakerHero
Com esta ponte H eu consigo controlar a velocidade de 2 motores sem utilizar o enable?
Estou tentando copiar o Linusbot ( https://arduinobymyself.blogspot.com.br/2013/01/linusbot-robot-seguidor-de-linhas.html ) mas não entendo como ele está controlando a velocidade dos motores em utilizar o enable,mandando apenas um PWM direto nos pinos IN1, IN2, IN3 e IN4.
COMO FAÇO PRA USAR 2 MOTORES DC E UM MOTOR SERVO ?
Olá, vc tem o DRIVER PONTE H L298N para o fritzing? obrigado.
Gostaria de saber se posso utilizar 2 motores 12v de vidro elétrico de carro nessa ponte?
então para fazer controle via pwm e so eu colocar a ligação do meu pwm no pino ativa MA isso assim consigo controlar a velocidade?
Boa tarde Rafael,
Isso mesmo. Grato.
Adilson – Equipe MakerHero
Olá amigos seria possível controlar a velocidade dos dois motores usando apenas um pino PWM.
Boa noite Elton,
Não testamos nessa configuração. A recomendação é usar um pino PWM para cada motor.
Abraço.
Adilson – Equipe MakerHero
Olá, eu tenho uma pergunta…
Eu poderia utilizar 4 motores em apenas um módulo desses ? (No caso dois em paralelo)
Ou eu poderia usar dois módulos desse para controlar 4 motores?
Abraço
Boa noite Yuri,
Use dois módulos para controlar 4 motores.
Abraço.
Adilson – Equipe MakerHero
Olá, estou em dúvida numa questão sobre o motor shield. Acontece que a entrada de 6-35v queimou, sendo que o motor é de 6v e a bateria de 12v (usávamos o regulador de tensão) só que acabou queimando por outros motivos. Eu poderia ligar minha bateria de 12v na entrada de 5v? Ou se pode trocar a porta queimada no ponte H?
Boa noite Calebe,
Recomendamos não alterar o circuito da placa.
Grato.
Adilson – Equipe MakerHero
Parabéns pela explicação minuciosa e esforço em passar seus conhecimentos para os estudantes da área mecatrônica e demais áreas. Muito legal!
Boa noite Thiago,
Muito obrigado. Bom poder ajudar. 🙂
Abraço !
Adilson – Equipe MakerHero
Como faço a ligação paralela para ligar um motor de 4 A?
Boa noite Fernando,
Não temos essa informação, pois ainda não testamos a ponte H nessa configuração.
Abraço.
Adilson – Equipe MakerHero
Obrigado, me ajudou bastante.
Boa noite Iuri,
Valeu ! Agradecemos a visita e aguardamos o seu retorno em breve.
Abraço.
Adilson – Equipe MakerHero
Ola amigo, você poderia arrumar a imagem do “MOTOR DC COM DRIVER PONTE H L298N”, para poder fazer um projeto no fritzing.
Obrigado
Boa tarde MakerHero, meu caso é o segundo, dois motores dc 12v com fonte externa, devo alimentar o arduino pelo plug de 2,1 mm com 12 v ?
Obrigado
Eu preciso usar 2 atuadores lineares que operam com tensão 24V.
É possível ligar esse 2 atuadores no mesmo L298N ?
Se sim, o L298N precisa ter uma fonte externa de 24V? É que no L298N que comprei, na parte de baixo da placa, que corresponde ao conector 6-35V está escrito 12V.
Obrigado.
Boa tarde Douglas,
Não testamos esse módulo com atuador linear. Verifique se ele não vai exceder as especificações de corrente da placa.
Abraço.
Adilson – Equipe MakerHero
O que eu posso fazer para aumentar a velocidade dos motores? Os pinos PWM já estão definidos como “255”
Boa tarde Lucas,
Se os pinos já estão como 255, então teoricamente os motores já estão na velocidade máxima.
Adilson – Equipe MakerHero
Como controlar essa ponte H com um controle de ps2? Já tenho o código do controle, como faço pra interligar os códigos?
Boa noite Lucas,
Não temos nenhum código pronto para esse tipo de controle.
Grato.
Adilson – Equipe MakerHero
Cara, parabéns pelo post. Gostaria de saber se é possível controlar um motor de passo de 1,4A com esse driver ligando-o a um arduino. Obrigado 😀
Boa noite Lucas,
O L298N suporta corrente de até 2A, assim, creio que não haveria problemas no controle do motor de passo que você tem.
Abraço.
Adilson – Equipe MakerHero
Grande Filipe,
Excelente explicação!
Só uma observação: Como estás usando o pino 9 como saída de PWM ele deveria estar setado como saída no setup, certo? pinMode(speedMx, OUTPUT);
Abraço!
Qual o código para controlar dois motores e um sensor ultrassonico usando o Driver Ponte -H L 298 ???
Boa tarde Flavio,
Você pode verificar os nossos posts tanto do Sensor Ultrasonico HC-SR04 como esse da Ponte H, juntando os dois códigos.
Nesse código da ponte H, copie a parte que se refere aos pinos IN1 e IN2 e renomeie para IN3 e IN4, assim você consegue controlar o segundo motor.
Abraço
Adilson – Equipe MakerHero
Não entendi , devo copiar no mesmo sketch um unico código para os dois motores e renomear IN1 e IN2 ?? Fiz isso e aparece mensagem de erro .Quanto for juntar os codigos tem o pino em que MA está ligado e o MB liga em que pino do arduino ?
Boa tarde Flavio,
Exato. Para o motor A você usa o IN1 e IN2, e para o motor B, IN3 e IN4.
Adilson – Equipe MakerHero
Fantástico, esclareceu todas as minhas dúvidas. Vlw MakerHero
Legal Renan, ficamos felizes 🙂
Bom dia Filipe, gostaria de saber se é possivel fazer com que o motor gire em gire no sentido horario e depois gire no sentido anti-horario, sem trocar as conexoes dos fios. Obrigado.
Sim é possível Otávio.
Veja a tabela de Ativa MA (In 1) e Ativa MB (In 2) logo acima. Alternando com GND e 5v nos pinos você muda a rotação.
Abraço!
Olá Felipe,
Gostei de todas as informações postadas aqui, foram de muita utilidade, agora quando for utilizar um motor de passo nesta placa como fica os jumpers? eles ficam fechados ou devo coloca-los na porta pwm do arduino? teria algum site que demonstre esta ligação?
Fiz um teste ligando os quatros fios no IN1, IN2 IN3, IN4 e mais duas ligações na porta PWM cada uma em um jumper mas não conseguir acertar a programação para o motor partir, ele apenas vibra, saberia me dizer onde estou errando?
Obrigado
Esqueci de perguntar: sabe me dizer se queimei/danifiquei a placa fazendo o que fiz?
E correção:
Para se controlar um motor que trabalha com 4,4V, eu alimento com +5V por exemplo em qual entrada? A de 5V? Com o jumper ou sem o jumper 5v? Não entendi o que este jumper faz… Ligo GND no GND, motor na OUT1 e OUT2 e saídas digitais do arduino na IN1 e IN2 – correto?
Obrigado.
Olá Arthur,
Respondi sua pergunta abaixo. Me informe depois se deu tudo certo.
Abraço!
Olá.
Possuo exatamente esta placa porém no “verso” dela mostra que as opções de alimentação são +12V GND +5V.
Na imagem deste post a entrada que diz permitir 6-35V na minha placa está escrito apenas +12V no verso. Sabe me dizer por que?
Outra coisa: liguei a placa com 3,3V na entrada de +5V e terra no GND. Deixei os jumpers do 5V, do ENA e do ENB conectados como estavam. Como não sabia como funcionava, apliquei PWM (arduino 0-5V/0-255) na entrada IN4 afim de controlar o buzzer 0-5V. O resultado foi que variando o PWM, o som do buzzer variava também mas não como o esperado – aumentava depois diminuía com uma variação crescente do PWM.
Enfim, para se controlar um motor que trabalha com ~5V, eu alimento com +5V a entrada de 6-35V, GND no GND, motor na OUT1 e OUT2 e saídas digitais do arduino na IN1 e IN2. E quanto ao PWN? Quando eu retirar o jumper, em qual dos dois pinos eu conecto o PWM?
Muito obrigado por responder – vai me ajudar de mais!
Abraço.
Olá Arthur,
Esta placa você comprou com a MakerHero? Pois não posso garantir as especificações de um outro modelo, por mais parecido que ele seja.
Se o motor trabalha com 5v, você pode conectar a fonte de alimentação no pino 5v da placa e desabilitar o jumper ATIVA 5v, ou seja, nenhuma fonte conectada a entrada 6-35v.
Quanto ao PWM você precisa retirar o jumper ATIVA MA e conectar sua saída PWM do controlador a este pino. Conecte o PWM no pino que tem mesmo barramento ENTRADA.
Abraço!
Posso fazer esse esquema de ligação para o motor que trabalha 3-6V?
https://www.makerhero.com/pd-11d0db-motor-dc-3-6v-com-caixa-de-reducao-e-eixo-duplo.html?ct=&p=1&s=1
No caso usando 5v apenas? Como vc citou para o motor de exatamente 5V
Olá Renan, a ligação deste post foi feita para um motor DC 12V. Para este motor DC 3-6V você precisa fazer outra ligação, visto que agora não usará a fonte externa, mas a própria fonte do Arduino.
Abraço!
Mas é preciso usar uma fonte externa, pois o motor consome uma corrente que o pino 5V do arduino não consegue fornecer
Bom dia estou com o mesmo problema do Renan. Existe a possibilidade de fazerem um post com motores https://www.makerhero.com/produto/motor-dc-3-6v-com-caixa-de-reducao-e-eixo-duplo/?
O arduino até consegue fornecer os 5v, porém a corrente máxima é de 200mAh, não vai nem conseguir ligar o motor, acredito.
O lance é fazer uma esquemática que alimente com uma bateria os motores, e outra para o arduino, sempre ligando o GND de ambas.
Gostaria de saber se com esse kit é possível criar um codigo para motorização de um telescópio.
Gostaria de saber Pq essa ponte h l298n vem com jumpers no ENA e ENB?
Olá Ronaldo,
O jumper no ENA e ENB são respectivamente o Ativa MA e Ativa MB, por padrão eles estão conectados para setar a velocidade máxima no motor. Se desejar controlar esta velocidade, tire os jumper e conecte ao PWM do Arduino.
Obrigado pela pergunta!
Olá, boa noite!
Você poderia postar um esquema de ligações que mostre as ligações dos motores e a alimentação do arduino.
Não ficou claro pra mim.
Alimento o arduino com o pino +5power? O.o
Olá Demétrius, pretendemos colocar o esquema de ligações futuramente, mas já mudamos o texto para facilitar. Poderias ver se tens alguma dúvida ainda?
Abraço!
Esse novo texto tirou minhas dúvidas… abraço. 😀
Ok Demetrius 😉
Abraço!
Como faz pra aumentar a velocidade dos motores?
Boa noite Lucas,
Na configuração do post os motores já estão em velocidade máxima. Você pode usar os pinos PWM para conexão aos pinos Ativa MA e Ativa MB para controlar essa variação de velocidade.
Abraço.
Adilson – Equipe MakerHero
Boa noite,estou fazendo um projeto semelhante a esse.Um motor DC com comandos para rodar em duas direções,mas,quero adicionar um fim de curso para uma “parada de emergência” ,estou tendo problemas na programação desse sistema,eu adiciono o fim de curso no final do loop e msm assim ele não responde.Se puder me ajudar eu agradeço muito.
Leonardo,
Abra um tópico no nosso fórum! Lá você pode postar o código pra gente te ajudar melhor 🙂
Abraços!
Diogo – Equipe MakerHero
Bom dia gostei do seu projeto sou estudante de engenharia como Faço p instalar bluetoh neste projeto